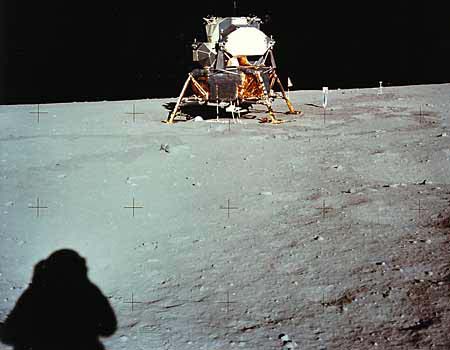
Оппоненты твердо стоят: все съёмки сделаны в «голливудском» павильоне, фальсификация! Американцы на Луне не были!
Однако,
в приведенном фрагменте рельсы сходятся на расстоянии многих
километров, а на фотографиях Апполонов достаточно 100 метров. Поэтому
объяснения «уклонизма» теней не дано.
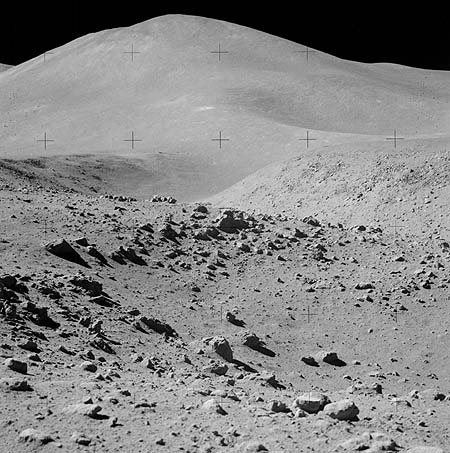
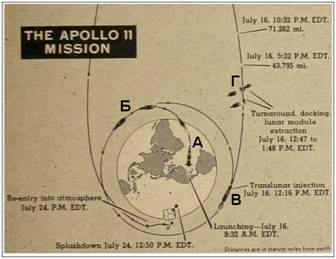
Вот
еще фотография горы Хэдли-Апеннины, - продолжают оппоненты. Снимок
сделан у подножия горы высотой 4 километров. На "холме" нет ни боковых
теней, ни каких-либо деталей. Почему? Известно, что на Луне отсутствует
воздушная перспектива и самые отдаленные предметы видны так же ясно,
как наиболее близкие. Наконец, любители-атрономы на расстоянии 300 тыс.
км делают снимки с подробными деталями.
Какой
стороне отдать предпочтение: весомым аргументам оппонентов или
Национальному Агентству по Аэронавтике и исследованию космического
пространства?
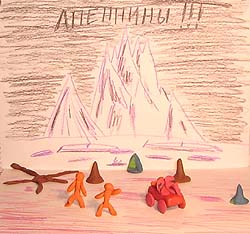
Картинка
составлена из горизонтальной и вертикальной плоскости из альбомных
разрисованных листов. Трехмерными объектами являются пластилиновые
фигурки, некоторые из которых переходят с горизонтальной на
вертикальную плоскости, и частично загнутый левый нижний край одного из
листов. Кадры смещены относительно друг друга на несколько мм.
Можно
видеть, что вертикальная и горизонтальные плоскости, какими бы они не
были разрисованными, исчезли. Остались только трехмерные фигурки, так
же виден левый край листа, который так же входит в панораму. Т.о.,
разделяются объекты трехмерные от двухмерных и искусственной панорамы.
Кроме этого, по толщине контура вокруг объемной фигурки можно грубо
оценить глубину панорамы и расстояние между объемными фигурами.
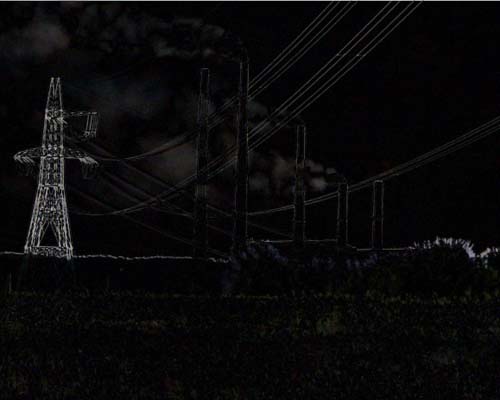
Другой пример.
Смещение камеры составляет 1,5 м.
Расстояние до электростанции около 4 км, до лесопосадки (левая часть горизонта снимка) около 2 км.
Ниже показано сведение снимков (напомню, что главным требованием
является максимальное вычитание заднего фона, расстояние до которого
более 3-ёх км, так как параллакс равен нулю).
 Мелкомасштабная картинка вычитания.
Мелкомасштабная картинка вычитания.
Крупномасштабная картинка вычитания.
Ниже показана изменение картинки вычитания при сдвиге на 1 пиксель.
 Сдвиг на пиксель вверх.
Сдвиг на пиксель вверх.
Сдвиг на пиксель вниз.

Сдвиг на пиксель вправо.

Сдвиг на пиксель влево.
Т.о., сведение кадров выполнено правильно.
Забрасываем кадры в гиф-аниматор и получаем стереокартинку:
 Стереофотография Змиевской станции.
Стереофотография Змиевской станции. Теперь можно изучать параллакс и определить расстояние до удаленных объектов.
Расстояние La до любого объекта A рассчитывается по формуле:
La =Lb x b / a
Где Lb – расстояние до объекта В, b – смещение объекта В, а – смещение объекта А.
Зная:
расстояние до переднего края - 5 м,
смещение переднего края составляет 85 мм (можно измерить линейкой, два белых колоска);
смещение ближайшей опоры ЛЭП около 1,2 мм,
из соотношения пропорций получим расстояние до опоры - 350 метров, до
второго столба при параллаксе 0,6 мм составит - 700. Расстояние до
лесопосадки (смещение приблизительно 0,2 миллиметра) - около 2-ух км.
Это уже граница изучения параллакса.
Итог: Как видим, простые операции преобразования над снимками сохраняют соотношения перспективы.
В случае изучения параллакса снимков Аполлонов, где расстояние до заднего фона,
гор 5 и более км, по бортовому журналу НАСА, тем более ожидается получение стереоизображений, как в примере с стереофотографией Змиевской станцией.
На основе изучения
стереоскопического параллакса проверяются фотоматериалы экспедиции Аполлон.
СПИСОК ЛИТЕРАТУРЫ ПО СТЕРЕОСКОПИЧЕСКОМУ ПАРАЛАКСУ
[1]. Лупичев Л.Н., Парфенов А.П., Шаманов И.В., Способ сканирования в стереоскопической системе. //Авт. свидетельство N 754208. Бюллетень N 29. 1980
[2]. Макаров И.М. Робототехника и научно-технический прогресс //V
Всесоюзное совещание по робототехническим системам, г. Геленджик:
Тез.докл.-М.,1990,4.1, С.3-4.
[3]. Иванюгин В.М. Исследование и разработка алгоритмов для математического обеспечения стереотелевизионной системы технического
зрения // Диссертация на соискание уч. степени к.т.н. ГОСИФТП. Москва,
1995 г.
[4]. Кирвялис Д.И. Проблемы зрения роботов // IV Всесоюзное совещание по робототехническим системам, г.Киев: Тез.докл.- Киев.,1987,Ч.2,С.57-58.
[5]. Синергетика //Сб.под, ред.П.В.Кадамцева -М.:Мир.1984
[6]. Вечканов В.В. и др. Многофункциональная мобильная робототехническая система для АЭС // Материалы научно-технической конф.
Роботы и манипуляторы в экстремальных средах, СПБ, -1992 г., С.39-43.
[7]. Иванюгин В.М.,Петухов С.В. Автоматическое отождествление контурных данных в стереотелевизионной системе технического зрения //
Всесоюз. конф. по искусст. интел., тез.докл. -М.:,1988, Т.2,С.155-160.
[8]. Катыс Г.П., Мамиконов Ю.Д., Мельниченко И.К., Корягин О.И. Информационные роботы и манипуляторы. // М.:Энергия,1968
[9]. Исследование робототехнических систем. // Под ред. Макарова И.М.,
Охоцимского Д.Е., Попова Е.П., -М.: АН СССР, Наука, 1982.
[10]. Катыс Г.П. Визуальная информация и зрение роботов // -М.: Энергия, 1979 100
[11]. Интегральные роботы. Пер. с англ. под ред. Поздняк Г.И. // - М.:Мир 1973,4.1,1975 ч.2.
[12]. Алоимонос Дж. 'Зрительное определение формы //ТИИЭР - M.:Mиp, 1988, N8, C.50-69.
[13]. Катыс Г.П. Оптические информационные системы роботовманипуляторов. //Под ред. Петрова Б.Н. -М.: Машиностроение, 1977.
[14]. Васильев В.Ф., Гурвич П.М., Лупичев Л.Н., Шаманов И.В. Исследование алгоритмов управления движением автономного планетохода методом математического моделирования. // Труды VII
Международного симпозиума ИФАК по автоматическому управлению в
пространстве. Том 4. ФРГ, Роттах-Эгерн, май 1976.-М. АН СССР, изд.
"Наука", 1978.
[15]. Катыс Г.П. Обработка визуальной информациии // М.Машиностроение 1990.
[16]. Катыс Г.П. Восприятие и анализ оптической информации автоматической системы //-М.: Машиностроение, 1986.
[17]. Материалы Лаборатории компьютерного зрения "Института Информационных Технологий"
[18]. Гурвич П.М., Илюхин А.С., Михайлов А.Б., Парфенов А.П., Шаманов И.В. Стереометрический способ определения координат поверхности объекта. // Авт. свидетельство N979854. Бюллетень N45.1982.
[19]. Петров Б.Н., Лупичев Л.Н., Шаманов И. В. и др. Проблема управления автономными подвижными планетными комплексами // Доклад на XI симпозиуме ИФАК секция XI Цахкадзор, авг.1974. Сб. Управление в пространстве т.2, изд."Наука", 1976.
[20]. Воробьева Т.М., Лупичев Л.Н. Операторный метод зрительного
восприятия внешней среды автономным роботом // М.: Техническая
кибернетика, N-5, 1984, С.230-235. 101
[21]. Гимельфарб Г.Л.,
Григоренко М.В. Алгоритмы бинокулярного и тринокулярного
вычислительного стереозрения // Сб. ст. Системы технического зрения,
Ижевск,1991, С.39-46.
[22]. Катыс Г.П. Оптические информационные системы роботов- манипуляторов. //Под ред. Петрова Б.Н. -М.: Машиностроение, 1977
[23]. Максимов В. В. Использование параллакса движения для восстановления пространственной ситуации без нахождения соответственных точек на последовательных изображениях сцены. //Сб. Распознавание образов. ИППИ АН ССР. -М.: Наука. 1977.
[24]. Марр Д. Зрение. Информационный подход к изучению, представлению и обработке зрительных образов.- М.'.Радио и связь,1987,- 400 с.
[25]. Розенфельд А. Машинное зрение. Основные принципы //ТИИЭР. Тематический выпуск. Машинное зрение. Перевод с анл.- М.:Мир, 1988.N8.C.10-16
[26]. Хьюбел Д. Глаз, мозг, зрение:// Пер.с англ.-М.: Мир, 1990. С.239.
[27]. Horn.B.K.P. Robot vision. The Mit Press Cambridge, Massachusetts
London, England [Перевод: Б.К.П. Хорн. // Зрение роботов -M.:Мир,1989
[28]. Duda R.O. Hart P.E. Pattern Classification and Scene Analysis,
Jon Wiley Sons New York. 1973 [ Перевод: Дуда Р., Харт П. //
Распознавание образов и анализ сцен. - М.:Мир, 1976.]
[29].
Поисковые исследования и разработка программно-аппаратных средств
машинного зрения для автоматического восприятия стереопарных,
тринокулярных и полинокулярных изображений, распознавания образов и
анализа сцен в интересах повышения эффективности и расширения возможностей управления оружием.//М.: ГОСИФТП.1994.
[30]. Создание системы машинного зрения на базе стереоблока, установленного на борту РТС. Разработка программного обеспечения 102
обработки видеоинформации от подвижной телекамеры //Отчет о НИР
"Подсказчик". М.:ИФТП,1993.
[31]. Разработка методов анализа изображений в СТЗ и математической модели управления роботом // Отчет о НИР (то же см. выше) М.:ИФТП 1990. N 6.63.90
[32]. Разработка алгоритмов и программ машинного анализа изображений для нахождения естественных ориентиров и определения
уклонений от опорной траектории. //Отчет о НИР (то же, см. выше),
М.:ИФТП. 1993^33.63.93.
[33]. Шаманов И.В., Васильев В.Ф., Петухов С.В. Обработка изображений в многоканальной стереосистеме машинного зрения. //Сб.
науч. тр. Прикладные проблемы искусственного интеллекта -М.:ИФТП 1991.
Сб.науч. статей. "Системы технического зрения". Ижевск, Ижевский
мех.институт, 1991 г.
мех.институт, 1991 г.
[34].
Геометрия стереофотосъёмки .











 До сих пор идет дискуссия «были ли американцы на Луне». Основные положения оппонентов посещения Аполлонов следующие
До сих пор идет дискуссия «были ли американцы на Луне». Основные положения оппонентов посещения Аполлонов следующие