Главная » 2011»Июнь»23 » Новая карта Аполлон-11 для доказательства пребывания человека на Луне. Критика и защита
Новая карта Аполлон-11 для доказательства пребывания человека на Луне. Критика и защита
17:03
Одним из грандиозных событий 20-го столетия была высадка человека на поверхность нашего спутника Луна. Согласно НАСА шесть миссий Аполлон посещали поверхность Луны и возвращались на Землю (1969-1972 гг.). Однако, уже через год после Аполлон-11 появились первые журналистские статьи и выходит книга математика Дж. Крайни, в которых факт высадки ставился под сомнение и приводились аргументы о фальсификации НАСА.
Прошло более 40 лет! Оппонентами миссии Аполлон были проведены новые расследования и написаны книги, которые раскрывают многочисленные неточности и ошибки НАСА, приводят факты масштабной фальсификации НАСА в Исследовательском
центре Лэнгли и секретной зоне 51 при участии голливудского режиссера
Стэнли Кубрика... Количество людей, которые не верят или сомневаются пребыванию американцев на поверхности Луны выросло и представило глобальное общественное мнение...
Илл. 1-2. Тренажеры, бутафория и фоновые изображения миссии Аполлон (нояб. 1966 гг.). Очень большое изображение Луны и другие виды снимались на киноплёнку при помощи установленной на рельсы кинокамеры, которая была направлена на большую вращающуюся модель Луны. У имитации Луны был внутри источник света, который проникал наружу через полупрозрачные стенки, значительно улучшая внешний вид. Так мы увидели видеофильмы, якобы сделанные из ЛМ о приближении к Луне, затем начало выхода на её орбиту, позже посадку на поверхность Луны. Материалы из Исследовательского центра Лэнгли, внутренние отчеты которых ожидают рассекречивания в 2026 - (см. сайт APOLLO FACTS).
Появились защитники НАСА, которые отстаивали правдивость миссии Аполлонов. Ниже представлена версия НАСА посадки лунного модуля :
Видео 1. Официальная посадка лунного модуля Apollo-11 (Орла) на Луну. Изображение в иллюминаторе сравнивается с современной картой Луны.
Видео 2. Современная аранжировка: Neil Armstrong First Moon Landing High Quality Widescreen
В Глобальной Сети разгорелся пожалуй один из самых горячих интернет-дискуссий между оппонентами и защитниками НАСА.
В 2009 г. орбитальный лунный зонд LROS (2009-2011 гг.) к 40-летию Аполлон-11 впервые передал снимки мест посадки Аполлонов. Защитники НАСА ликовали. Однако, сравнение официальных снимков и карт Аполлон из научных отчетов 1969 гг. со снимками LROS показали на качественное различие положений и размеров: лунного модуля, кратеров, оборудования, камней, валунов... Идентичность между снимками Аполлон с поверхности и снимками LROS с орбиты Луны отсутствовала. Подробнее...
Илл. 3. Наложение карты камер из официального отчета Аполлон-11 и снимка LROC.
Общечеловеческая позиция вокруг Аполлонов раскололась глубже на "были и не были американцы на Луне".
Ниже представлена новая карта положения фотокамер, лунного модуля, оборудования, камней, отдельных кратеров и маршрутов астронавтов для Аполлон-11. Автором является Владимир-Вениамин Пустынский, хорошо известный во Всемирной Паутине, как защитник НАСА.
Илл. 4. Новая карта положения фотокамер, лунного модуля, оборудования, камней, отдельных кратеров и маршрутов астронавтов для Аполлон-11. Скачать с большим разрешением и детализацией 500х500 метров в формате pdf [158.4Kb].
По мнению автора новая карта Аполлон-11 имеет погрешность менее 30 см вблизи ЛМ и дает ошибку 2-5% для удаленных объектов. Карта позволяет провести фотограмметрические исследования снимков Аполлон-11, сравнить со снимками ЛРОС и показывает на их абсолютную идентичность. По мнению В.-В. Пустынского данное совпадение доказывает достигнутый результат НАСА - американцы были на Луне в 1969 году!
Мы, прежде, чем исследовать совпадение ближних и дальних объектов фотоснимков Аполлон-11 и снимков с орбиты LROS, рассмотрим: на самом ли деле новая карта положений камер, оборудования, камней и валунов имеет заявленную точность относительно снимков Аполлон-11 и не является подгонкой.
Ок! Ждем автора новой карты положений камер, оборудования, камней, кратеров и валунов для доказательства пребывания человека на Луне.
Сразу же возникают простые вопросы: Почему за 40 с лишним лет НАСА не подготовило карту Аполлон-11 в соответствии с их снимками лунного ландшафта, а так же не презентовала её? Почему карты Аполлонов уточняются под новые результаты LROS?
Давайте дадим сначала ссылку на адрес оригинала http://www.workingonthemoon.com/Vlad/a11photomapVP110423.pdf и на статью по фотограмметрии http://www.workingonthemoon.com/Vlad/a11Photogrammetry.html . На всякий случай.
> Ждем автора новой карты положений камер, оборудования, камней, кратеров и валунов для доказательства пребывания человека на Луне.
Списка не ждите. Я не буду сейчас выкладывать список координат и вращений (по 6 параметров) для каждой из 121 камеры в моей сцене и координаты (по 3 штуки) для примерно полутысячи реперов. Потом, может быть, я это даже сделаю, но только после публикации.
Сейчас же я охотно готов сообщать значения (координаты и вращения) для ЕДИНИЧНЫХ объектов (камер и реперов). Вы спрашивайте, что конкретно Вас интересует, и я буду давать нужные Вам значения. Только одно условие: Вы предварительно САМИ делаете какой-то расчет, с помощью которого показываете, что предложенная мною карта якобы ошибочна. Т. е. Вы показываете, в каком месте Вы якобы обнаружили ошибку и расчетом демонстрируете это. После этого выхожу я (весь в белом :) ) и даю Вам правильные цифры. Пойдет? А то Вы давали понять, будто Ваши расчеты якобы показывают ошибки в моей карте:
"Провел расчет определения положений камер. Сравнивая с Вашими картами - видно различие. В случае некоторых положений Ваших камер размеры артефактов получают неверное значение" - это Ваши слова.
Вот покажите свои расчеты и покажите, где там что неправильно с артефактами. А потом я покажу Вам, что все правильно.
> Сразу же возникают простые вопросы: Почему за 40 с лишним лет НАСА не подготовило карту Аполлон-11 в соответствии с их снимками лунного ландшафта, а так же не презентовала её?
Сам не знаю. :) Наверное, никому это не интересно было... Удивляюсь также, что я сделал такую карту первым не только среди профессионалов, но и среди любителей. Ведь соответствующий софт давно доступен, кто-нибудь и до меня мог бы им воспользоваться... Может быть, дело в трудоемкости? Я убил кучу времени на это дело, причем рабочего времени. Долгие расчеты на довольно быстром компьютере, многоминутные пересчеты после каждого уточнения каждого репера... В общем, та еще работка.
> Почему карты Аполлонов уточняются под новые результаты LROS?
Потому что сники LROC дают новый материал, по которым можно уточнять карты. Например, только снимки LROC позволили узнать, где же на самом деле остановились и повернули назад астронавты А-14 в походе к кратеру Коун.
Но моя карта построена безо всякого участия снимков LROC. Орбитальные снимки не имеют к ней никакого отношения, она целиком сделана на основе снимков с поверхности и из окон ЛМ.
Начнем со снимка и положения камеры 5862 - выход Базза Олдрина. Данной камеры нет на официальных картах Аполлон-11.
Первый выход Базза Олдрина, снимает Амстронг. AS11-40-5862. Скачать с разрешением 3900х3900.
Согласно данным НАСА размер бокового люка ЛМ равен 32 дюйма или 81,3 см.
После небольшого поворота для выравнивания горизонта снимка имеем координаты для снимка с разрешением 3900х3900:
центр снимка = 1953/1968;
левый край над нижним изгибом люка = 1896/1644;
правый край над нижним изгибом люка = 2649/1614.
Из фотограмметрии получаем угловой размер люка = 9,35 градуса (для расчетов было принято, что фокусное расстояние камеры Хасселя = 61,5 мм; переводной коэффициент цифрового фотоснимка 10 мм = 740 пикселей).
По новой карте (илл. 4) с учетом эскиза лунного модуля расстояние до люка 4,4 м, высота над камерой до люка равна 2,5 м.
Тогда получаем, что ширина люка равна 83,3 см. Есть хорошее совпадение. Ошибка составляет 2,5%!
Здесь надо отметить, что итоговый результат зависит от чертежа лунного модуля ЛМ-5. Данная техническая документация уничтожена сотрудниками НАСА, есть только технический эскиз, на котором размеры ЛМ плавают с ошибкой 8%.
Если мы возьмем расстояние от камеры до люка 5,1 м и высоту - 2,7 м, тогда ширина люка равна 95,0 см. Ошибка составляет 16,8%! Это далеко от заявленной точности новой карты Аполлон-11!
У меня нет сейчас возможности отвечать по существу (спешу), поэтому пара замечаний.
> После небольшого поворота для выравнивания горизонта снимка имеем координаты для снимка с разрешением 3900х3900
Не надо делать повороты неизвестной величины. Не надо самостоятельно редактировать снимки, а если Вы уж что-то решили повернуть, так точно указывайте, на какой угол.
Но лучше берите координаты с ОРИГИНАЛЬНОГО снимка. Не редактируйте его самостоятельно.
> Из фотограмметрии получаем угловой размер люка = 9,35 градуса (для расчетов было принято, что фокусное расстояние камеры Хасселя = 61,5 мм; переводной коэффициент цифрового фотоснимка 10 мм = 740 пикселей).
Как получаете? Точно изложите, какие формулы Вы используете, чтобы Ваши результаты можно было проверить.
> Есть хорошее совпадение. Ошибка составляет 2,5%!
Допустим, хотя надо проверить.
> Если мы возьмем расстояние от камеры до люка 5,1 м и высоту - 2,7 м, тогда ширина люка равна 95,0 см. Ошибка составляет 16,8%! Это далеко от заявленной точности новой карты Аполлон-11!
Непонятно, почему надо брать расстояние от камеры до люка 5,1 м и высоту 2,7 м, если Вы еще недавно брали совершенно другие величины (4,4 м и 2,5 м). Вы определитесь, ЧТО ИМЕННО Вы берете и НА КАКОМ ОСНОВАНИИ.
Если Вы пользуетесь МОИМИ фотограмметрическими результатами (хоть я и не вполне понял, как Вы из них извлекли цифры высоты) и находите соответствие с официальными данными в 2,5 % - значит, все великолепно. Если Вы пользуетесь каким-то эскизом и не находите соответствия - значит, эскиз имеет погрешность, вот и все. Потому что официальные размеры люка вполне известны, а моя фотограмметрия - вещь вполне точная, ошибки около ЛМ могут быть порядка 5 см, но вряд ли намного больше.
Т. е. определитесь, Вы что опровергнуть-то хотите? Эскиз, где Вашими же словами "размеры ЛМ плавают с ошибкой 8 %", или мою карту? Если Вы будете пытаться опровергать мою карту, варьируя входные данные согласно погрешности какого-то эскиза, то Вы в результате найдете только погрешность эскиза, но никак не моей карты.
Вениамин, привет! Данный снимок был дан, чтобы Вы проверили свою считалку и итоговый результат. Формулы расчета указаны по ссылке в сообщение. Если не ясна теорема Пифагора, спрашивайте, где именно?
Положения камеры 5862 зависит от входных технических данных ЛМ, а именно от расстояния до люка и высоты люка над другим элементом ЛМ (например, опорной тарелкой). Такие данные можно взять с технического эскиза ЛМ или технических чертежей. Последних нет! Привести точные данные для глубины и высоты положения люка ЛМ Вы не можете. А поскольку размеры на тех. эскизе не точные, погрешность 8%, то и положение данной камеры может быть определено с точностью 8% и более. Это точность положения до полуметра. Никак 3 см!
По поводу исправления горизонта поворотом снимка. Поворот всего снимка не меняет взаимные углы, они сохраняются согласно законам Геометрии. Просто этим преобразованием Вы приводите снимок к правильному виду. На десятые доли процентов меняется значение из-за перспективных искажений или при удалении от центра к периферии снимка. Однако, если Вы делаете измерения для снимков, когда фотокамера повернута к горизонту на 30% для составления карты (проекции на плоскость ХУ), очевидно, без исправления горизонта подход будет не аккуратный.
Ок! Перехожу к камере и снимку AS11-40-5872. Здесь не буду усложнять сообщение значением координат. Но если они нужны, тогда дам. Углы поворотов снимков буду приводить.
Снимок AS11-40-5872. Положение данной камеры отличается от официального на 2,4 м.
Угол поворота снимка к горизонту 2,96 градуса.
Снимок AS11-40-5872. Красными точками обозначены реперные точки, между которыми определяются углы. Точки значительно увеличены для наглядности, на самом деле на снимке с разрешением 3900Х3900 размер реперной точки 2 пикселя. Просмотреть с разрешением 3900х3900.
По снимку AS11-40-5872 угол между SWC и центром опорной тарелки "+Y" составляет 5,93 градуса. По Вашей карте с учетом высоты фотокамеры 1,37 м над SWC и "+Y" угол составит 3,48 градусов. Ошибка карты составит 70%!
По снимку AS11-40-5872 угол между валунами t1 и t2 составляет 2,84 градуса. По Вашей карте угол составит 2,90 градусов. Ошибка карты составит около 2%!
По снимку AS11-40-5872 угол между SWC и валуном t3 составляет 15,12 градуса. По Вашей карте с учетом высоты фотокамеры 1,37 м над SWC угол составит 16,07 градусов. Данное значение угла зависит от высоты валуна, что может быть использовано как свободный подгоночный параметр... Ошибка карты составит около 6%!
Как видим результаты погрешности далеко выходят от Вами заявленной точности карты!
> Данный снимок был дан, чтобы Вы проверили свою считалку и итоговый результат.
Как я могу проверить, если Вы не указали ни своего угла поворота снимка, ни конкретных точек?
> Формулы расчета указаны по ссылке в сообщение. Если не ясна теорема Пифагора, спрашивайте, где именно?
ПРИВЕДИТЕ РАСЧЕТ.
> Положения камеры 5862 зависит от входных технических данных ЛМ, а именно от расстояния до люка и высоты люка над другим элементом ЛМ (например, опорной тарелкой).
Нет. Положение камеры зависит от того, где сделал фотографию Армстронг. Ни от чего другого.
> Такие данные можно взять с технического эскиза ЛМ или технических чертежей. Последних нет!
Если чего-то нет у Вас, этого не значит, что его нет вообще.
> Привести точные данные для глубины и высоты положения люка ЛМ Вы не можете.
Я могу промерить.
> А поскольку размеры на тех. эскизе не точные, погрешность 8%, то и положение данной камеры может быть определено с точностью 8% и более. Это точность положения до полуметра. Никак 3 см!
У Вас какие-то галлюцинации. Какое отношение погрешность какого-то эскиза имеет к точности определения положения камеры?! Конечно, я беру с одного из эскизов базовый размер, однако этот базовый размер на эскизе установлен с точностью НАМНОГО выше 8 % и, кроме того, независимо проверен по достоверно известным размерам и установлено совпадение НАМНОГО точнее 8 %.
> По поводу исправления горизонта поворотом снимка. Поворот всего снимка не меняет взаимные углы, они сохраняются согласно законам Геометрии.
Он меняет координаты точек, которые Вы называете.
> Просто этим преобразованием Вы приводите снимок к правильному виду.
Правильный вид - это тот, как снимок сделан. Все остальное - преобразования.
> На десятые доли процентов меняется значение из-за перспективных искажений или при удалении от центра к периферии снимка.
При повороте ничего этого не меняется.
> Однако, если Вы делаете измерения для снимков, когда фотокамера повернута к горизонту на 30% для составления карты (проекции на плоскость ХУ), очевидно, без исправления горизонта подход будет не аккуратный.
Это у Вас опять какие-то галлюцинации. Фотограмметрия устанавливает и координаты (3 штуки), и ПОВОРОТЫ камеры (3 штуки). Поэтому поворот камеры в используемой системе координат относительно оптической оси находится из фотограмметрии так же, как координаты и все остальное. И он никак не влияет на построение карты.
Снимок 5862, кстати, имеет поворот ок. -0,9 градусов в моей системе координат. Ее координаты (5.94; 5.03; 1.97).
> Ок! Перехожу к камере и снимку AS11-40-5872.
То есть никаких проблем с размером люка Вы обнаружить не смогли, и все Ваши претензии сводятся к погрешности отдельных размеров по эскизу. Правильно?
Кстати, где Вы нашли на эскизе погрешность 8 %? Пожалуйста, продемонстрируйте картинками. Какие размеры Вы определяли, какие размеры у Вас дают такой разброс?
> Здесь не буду усложнять сообщение значением координат. Но если они нужны, тогда дам. Углы поворотов снимков буду приводить.
Лучше приводите все. И расчеты тоже. Иначе Ваши заявления невозможно перепроверить.
Вениамин, у Вас снова очень много не нужных слов, не по сути и размытие темы (оффтоп)!
Всё банально просто! Смотрите, снимок AS11-40-5862. У меня угловой размер люка = 9,35 градуса. Какой получается у Вас? Давайте сравним. Думаю, что угловые размеры люка у нас одинаковые. Почему же Вы не приводите действительно значимые цифры и пишите ерунду - координаты (5.94; 5.03; 1.97). Понимаете, что вы ведете диспут к необозримости круга обсуждаемых вопросов.
Хорошо! Если не понимаете, как применять теорему Пифагора для фотоснимков, тогда расчет приведу ниже.
Теперь о базовых размерах ЛМ. Если у Вас точность 3 см карты и Вы используете базовые размеры ЛМ, тогда приведите техническую документацию по расстоянию от опорной тарелки до люка и высоту люка над опорной тарелкой. Ведь эти значения важны для определения, где находится камера AS11-40-5862 относительно бокового люка лунного модуля (через которые выходили Амстронг и Олдрин). Или Вы с неба брали данные размеры? Вообще, Вы можете привести высоту и расстояние от камеры до люка?
Ниже координаты для снимка AS11-40-5872 с разрешением 3900х3900 (после поворота снимка к горизонту на 2,96 градуса):
центр снимка = 1988/1967
"-Z" = 1903/2037
"+Y" = 2111/2137
SWC = 1688/2402
t1 = 406/1430
t2 = 659/1531
t3 = 804/1517
t4 = 1076/1527
Ниже координаты по карте (масштаб 1 м = 36 пикселей):
камера 5872 = 669/591
"-Z" = 1238/992
"+Y" = 1049/886
"-Y" = 1129/1180
"+Z" = 942/1073
SWC = 940/784
t1 = 6708/2440
t2 = 4961/2146
t3 = 5421/2474
t4 = 5168/2674
Кстати, почему на карте не отмечено положение валуна w? Об этом валуне мы много уже писали. Вам было указано, что здесь проблема идентификации и противоречий между снимками Аполлон-11 и ЛРОС. У Вас таких проблем на словах вроде нет. Так почему не отмечены координаты валуна w?
квадрат расстояния от SWC снимка до главной оптической точки объектива P16 = (1688-1988)^2+(2402-1967)^2+4613^2 = 21558964 (пиксель^2)
квадрат расстояния от "+Y" снимка до главной оптической точки объектива Q16 = (2111-1988)^2+(2176-1967)^2+4613^2 = 21338579 (пиксель^2)
расстояние от SWC до "+Y" снимка R16 = ((1688-2111)^2+(2402-2176)^2)^0,5 = 479,5884 (пиксель)
Получаем угол между SWC и "+Y" снимка = (180/3,14)*ACOS((P16+Q16-(R16^2))/(2*P16^0,5*Q16^0,5)) = 5,931595 (градус)
Можете посчитать в мм (для снимка AS11-40-5872: 10 мм = 745 пикселей). Очевидно, результат будет тот же.
Вот и вся теорема Пифагора применительно к снимку. Проще и яснее, чем защитники НАСА навязывают считалку на основе сферической тригонометрии.
Теперь расчет по теореме Пифагора угла SWC и "+Y" по Вашей карте положений камер, оборудования, камней, кратеров и валунов "для доказательства пребывания человека на Луне":
расстояние от камеры до "+Y" B23 = ((1049-669)^2+(886-591)^2+(49-0)^2)^0,5/36 = 13,4321 (метр)
расстояние от камеры до SWC C23 = ((940-669)^2+(784-591)^2+(49-0)^2)^0,5/36 = 9,34129 (метр)
расстояние между SWC и "+Y" D23 = ((1049-940)^2+(886-784)^2+(0-0)^2)^0,5/36 = 4,146711 (метр)
Получаем угол между SWC и "+Y" карты = (180/3,14)*ACOS(((B23^2)+(C23^2)-(D23^2))/(2*B23*C23)) = 3,476406 (градус)
Видим, что Ваша карта дает угол 3,48, в то время как на официальном снимке данный угол равен 5,97 градуса. Противоречие или ошибка карты составляет почти 70%! А Вы заявляли о точности 2-4%, а вблизи ЛМ ещё ниже.
Напомню, что мы проверяем Вашу карту на точность, а так же нет ли элементов подгонки, если есть, тогда конкретно какие.
Подгоночным параметром может выступить высота местности. Т.е. наряду с координатами Х и У карты вводится координата Z. Так значение угла между SWC и валуном t3 = 16,07 градусов получено при возвышении валуна t3 над SWC на 1 м. При возвышение на 2 м над SWC данный угол = 16,28 гр. Ошибка составит 8%. Если же валун находится во впадине или - 1 м относительно SWC, тогда угол = 15,86 гр. Ошибка составит 5%. Т.о, подгоночным параметром может выступить высота местности.
Пожалуй, Ваша карта с заявлением об абсолютной идентичности снимков Аполлон-11 и LROS летит прахом в корзину мусора.
> Всё банально просто! Смотрите, снимок AS11-40-5862. У меня угловой размер люка = 9,35 градуса. Какой получается у Вас? Давайте сравним.
Точки на краях люка имеют координаты (1878, 1665) и (2627, 1568). Расстояние между крестами 740 пикселей, центральный крест (1956, 1971). Фокусное расстояние (дистанция фокусировки 15 футов) 61,93 мм. Считалка дает 9,35 градусов. Совпало с Вашим.
> Думаю, что угловые размеры люка у нас одинаковые. ... > Ниже координаты по карте (масштаб 1 м = 36 пикселей):
Хорошо. Если возникнет надобность, я проверю эти цифры.
> Кстати, почему на карте не отмечено положение валуна w? Об этом валуне мы много уже писали.
Потому что карта составлена раньше, чем мы стали заниматься валуном w. В будущем я, наверное, отмечу его и на карте, и добавлю к числу идентифицированных. Но сейчас факт его идентификации еще нигде не упомянут, кроме нашего диалога. :) Я в последнее время был сильно занят другими вещами, поэтому не имел возможности обновить сведения.
> Вам было указано, что здесь проблема идентификации и противоречий между снимками Аполлон-11 и ЛРОС. У Вас таких проблем на словах вроде нет. Так почему не отмечены координаты валуна w? Да, как видно.
> Почему же Вы не приводите действительно значимые цифры и пишите ерунду - координаты (5.94; 5.03; 1.97). Понимаете, что вы ведете диспут к необозримости круга обсуждаемых вопросов.
Я привел координаты камеры 5862 в моей системе координат.
> Если у Вас точность 3 см карты и Вы используете базовые размеры ЛМ, тогда приведите техническую документацию по расстоянию от опорной тарелки до люка и высоту люка над опорной тарелкой. Ведь эти значения важны для определения, где находится камера AS11-40-5862 относительно бокового люка лунного модуля (через которые выходили Амстронг и Олдрин).
Эти значения совершенно неважны "для определения, где находится камера AS11-40-5862 относительно бокового люка лунного модуля (через которые выходили Амстронг и Олдрин)". У меня нет соответствующих данных из технической документации, и нет нужды в этих данных. Фотограмметрия построена по другим реперам. Но, конечно, я мог бы измерить расстояния от опорных тарелок до люка. Но зачем? Координаты любых точек (которые видны хотя бы на двух снимках) я могу получить из уже построенной сцены.
> Ниже координаты для снимка AS11-40-5872 с разрешением 3900х3900 (после поворота снимка к горизонту на 2,96 градуса):
Зачем Вы поворачивали снимок? Не надо ничего поворачивать. Не поворачивайте, оставьте так.
Что такое 4613, откуда эта цифра?! И зачем добавляется ее квадрат?! Совершенно непонятно. Соответственно дальше смотреть не буду, пока не объясните, откуда берете все цифры. И не поворачивайте снимок, не усложняйте работу себе и мне.
> расстояние от камеры до "+Y" B23 = ((1049-669)^2+(886-591)^2+(49-0)^2)^0,5/36 = 13,4321 (метр)
Откуда берется 49, что это такое?
> Видим, что Ваша карта дает угол 3,48, в то время как на официальном снимке данный угол равен 5,97 градуса. Противоречие или ошибка карты составляет почти 70%! А Вы заявляли о точности 2-4%, а вблизи ЛМ ещё ниже. > Пожалуй, Ваша карта с заявлением об абсолютной идентичности снимков Аполлон-11 и LROS летит прахом в корзину мусора.
Пока что мы видим, что Вы вместо подсчета вставляете в малопонятные формулы непонятные цифры. Объясняйте КАЖДУЮ цифру, которую используете.
Угол люка 9,35 градусов! Великолепно! Теперь Вы наконец убедились, что теорема Пифагора работает. И как же Вы разместили камеру для 5862 без базовых размеров ЛМ на своей карте? Подгонкой, по известному размеру люка? Ответить можете? Вы так же не ответили, какая у Вас высота люка над камерой и какое расстояние до камеры в метрах?
Т.к., диспут вокруг валуна w у нас идёт давно, очевидно, определение его положения на карте важно, чтобы поставить точку. Или Вы опустите острый спорный вопрос?
Цифры "4613" для подсчета по снимкам Аполлон и "49" по новой карте - это банально, Вениамин! 4613 = 61,92 x 74,5 - это расстояние от главной оптической точки объектива до цента пленки в пикселях, где, как Вы догадались, 61,92 мм - это фокусное расстояние объектива Хасселя с резкостью от 15 футов до бесконечности; 74,5 - это переводной коэффициент мм в пиксель или десятая часть расстояния между двумя крестами оцифрованного снимка AS11-40-5872 - 10 мм пленки = 745 пикселя снимка. 49 = 1,37 х 36 - это высота камеры в пикселях по Вашей карте, где 1,37 - это высота камеры над поверхностью в метрах, 36 - это масштаб карты или 36 пикселей = 1м.
Давайте поставим ограничения на ответное сообщение, как в шахматной партии на ход. Возьмем 3 суток! По "погодным" причинам (их обосновывают) - 5 суток. Если нет ответа и нет форс мажора, тогда признается проигрыш.
> Угол люка 9,35 градусов! Великолепно! Теперь Вы наконец убедились, что теорема Пифагора работает.
Не понимаю, о чем Вы. Люк небольшого (углового) размера, поэтому его размер можно более-менее точно оценить, пользуясь универсальной переводной мерой из миллиметров в градусы (если Вы так поступаете). На самом деле я не очень понимаю, каким образом Вы считаете те или иные углы. Раньше Вы их считали совершенно неправильным способом. Тогда я научил Вас считать правильно и даже дал считалку в Экселе. Сейчас Вы либо не пишете, как считаете (но все время твердите про теорему Пифагора, не знаю, что Вы под этим имеете в виду), либо, когда Вас просишь дать цифры, берете эти цифры невесть откуда.
Ну да ладно. Будем надеяться, в каждом конкретном случае мы сможем разобраться, что и как Вы делаете. Если Вы будете все делать правильно, у Вас все получится. Если у Вас что-то не получается, значит, Вы делаете что-то неправильно.
> И как же Вы разместили камеру для 5862 без базовых размеров ЛМ на своей карте? Подгонкой, по известному размеру люка? Ответить можете?
Я уже давно ответил. Размер люка вообще никакого участия в расчетах не принимал, я его и не помнил точно, когда делал фотограмметрию, и не использовал нигде и никак. Это совершенно не нужно. Только недавно Вы спросили про размер люка, и я нашел его в одном из документов.
Камера 5862 размещается тем же способом, что и любые другие. На этом снимке имеется ряд объектов, которые используются в качестве реперов и, соответственно, видны на ряде других снимков. В частности, на этом снимке есть сочленения ступенек с боковинами лестницы, нижние углы дефлектора пламени двигателей RCS, световые маяки в верхней части модуля, табличка "United States", американский флаг на модуле, и т. п. Эти объекты являются реперами в моей фотограмметрической сцене, их координаты определяются по всей совокупности снимков. Снимок 5862 - это одна из фотографических проекций 3-мерной сцены, и положение реперов на ней однозначно определяет координаты и повороты камеры 5862.
> Вы так же не ответили, какая у Вас высота люка над камерой и какое расстояние до камеры в метрах?
На этот вопрос невозможно ответить, потому что люк не является точечным объектом. Укажите, какая конкретно точка люка Вас интересует; и если эта точка видна хотя бы на двух снимках, я смогу дать Вам расстояние до сантиметра.
> 4613 = 61,92 x 74,5 - это расстояние от главной оптической точки объектива до цента пленки в пикселях
А, теперь понятно, как Вы считаете. Вроде бы, так тоже можно, пока не вижу ошибки. Теперь могу пересчитать и я. Давайте не будем вращать снимок, а оставим его как есть. Буду мерить быстро, если в пару пикселей просчитаюсь, не обессудьте и поправьте, если что.
5972: Среднее межкрестовое расстояние 744 пикселя; Фокусное расстояние 61,93 мм; Координаты: Центральный крест (1963; 1960) Основание SWC (1644; 2379) Центр северной опорной тарелки (2085; 2145).
Подставил в свою считалку, получил 6,18 градусов. У Вас 5,93? Это неплохое совпадение. Разница в 4 % может быть связана с разным определением положения центра опорной тарелки, например (я его определяю точнее, чем Вы :) ).
Теперь давайте посчитаем по моим координатам (не буду считать по карте, т. к. карта построена по координатам; если найдете какое расхождение, говорите).
Координаты камеры 5872: (8,02; -10,71; 1,31) Координаты основания штока: (2,11; -4,17; -0,06) Координаты центра опорной тарелки: (0; 0; 0).
Теперь расстояния, по теореме Пифагора: от камеры до тарелки 13,44 м (у Вас 13,43 м, совпадает) от камеры до штока 8,92 м (у Вас 9,34 м - большая ошибка, ищите, откуда она взялась) от тарелки до штока 4,67 м (у Вас 4,15 м, снова большая ошибка).
Угол по теореме косинусов будет 6,16 градусов. У Вас 3,48 градусов - у Вас ошибка. Ошибка из-за двух неправильных расстояний. Значит, Вы неправильно измеряете расстояния. Я сделал копию карты с экрана и померил расстояние "линейкой" в Фотошопе. Получил для расстояния от тарелки до штока 4,68 метров. Как Вы умудрились измерить 4,15 метров?? Измерил "линейкой" по карте расстояние от камеры до основания штока. Получил 8,84 м по горизонтали, с учетом высоты 1,31 метр будет sqrt(8,84*8,84+1,31*1,31) = 8,94 м. Как Вы получили 9,34 м?! Это невероятно. У Вас очень большие ошибки в определении расстояний по карте. Проверить, где конкретно Вы их сделали, невозможно, так как Вы не выложили графический файл с картой, по которому измеряли (pdf-файл можно по-разному растянуть).
Так что опять Ваша ошибка получается. Выкладывайте в будущем все графические файлы, по которым измеряете, чтобы можно было показать конкретно, где Вы допускаете ошибки. Но ошибки очевидны, файл pdf с картой общедоступен, и каждый может убедиться, что расстояния именно такие, как я назвал.
И с углами выходит полный порядок. По фотографиям 6,18 градусов, по карте 6,16 градусов. Совпадение в пределах сотых градуса. Все как и должно быть.
> Т.к., диспут вокруг валуна w у нас идёт давно, очевидно, определение его положения на карте важно, чтобы поставить точку. Или Вы опустите острый спорный вопрос?
Никакого "острого спорного вопроса" нет. Более того, я сейчас подумал, что на карте этот булыжник в любом случае отметить не получится. Его положение определяется не по самой сцене (где этого не позволяет точность), а отождествлением "вручную", отысканием подходящего кандидата. Соответственно он из того же разряда, что валуны серии q: на фотограмметрической карте их нет, они есть лишь на отождествляемых снимках LRO. Малый параллакс не позволяет позиционировать объект с достаточной точностью, его можно отождествить по азимуту. Вот и все.
> Давайте поставим ограничения на ответное сообщение, как в шахматной партии на ход. Возьмем 3 суток! По "погодным" причинам (их обосновывают) - 5 суток. Если нет ответа и нет форс мажора, тогда признается проигрыш.
Вы хотите объявить себя победителем или Вы хотите узнать истину? Через несколько дней я уеду в отпуск на пару недель, Вы можете себя объявить победителем в любых дискуссиях, в которых я не участвую. Но отвечать я могу тогда, когда у меня есть время. Надеюсь, карты за несколько дней не прокиснут и математические законы не изменятся. И с цифрами ничего не станет.
Как их вообще можно было перепутать? Ведь видно же по карте, что SWC1 находится прямо на центральном азимуте камеры 5872, что не соответствует самому снимку, а вот шток на карте слева от центрального азимута (что соответствует снимку). Если уж Вы перепутали, так ничего не нужно было и считать. Сказали бы просто - так мол и так, ваша камера смотрит прямо на SWC, хотя по снимку видно, что шток SWC слева... ;)
По снимку AS11-40-5862. Если Вам не нужны базовые размеры ЛМ, тогда ясно и кратко опишите, как Вы составляете систему уравнений, какие основные параметры, в какой среде происходит поиск оптимального решения, какая задается точность решения, в Ехсеl (чтобы не строить догадки)?
По валуну w. Вы не точны. Этот валун есть на снимках 5872, 5873 и 5913. Вам этого не достаточно для нахождения координат?
По поводу поворота снимка к истинному горизонту. Это аккуратный подход. Любой читатель сможет визуально по снимку оценить ландшафт, наклон ЛМ, положение опорных лап, кратеров... Нет обманчивых визуальных ощущений. Не будут накапливаться субъективные ошибки при изучении снимков. Если же Вы настаиваете и хотите проводить горизонт через разметочные кресты фотокамеры Хасселя, тогда имеем очередное противоречие НАСА. Яркий пример:
Нарушение горизонта ландшафта по разметочным крестам снимка - правый горизонт снимка на 4,5 градуса выше, чем левый - удаленный ландшафт идет на возвышенность, горы Кавказа. Согласно документации, кресты встроены в фотокамеру, отмечают горизонт и расстояние между объектами. AS11-40-5870, просмотреть с большим разрешением 3900Х3900.
По поводу Вашей считалки, я сразу же от нее отказался. Ибо использование сферической тригонометрии, когда можно использовать простую теорему Пифагора - это не ясный подход и плохой тон для широкой публики.
По 5872. Вы не аккуратны! Есть общепринятые стандарты обозначений и их первоочередность на картах. Если красным обозначен SWC, то и точка будет красной - никак черной букашкой рядом с жирной красной точкой. Ну а SCS1? Этого нет в миссии Аполлон-11. Есть ALSCC-1 - стереокамера! Значение ALSCC для фотограмметрии второстепенное, можно было выполнить малым шрифтом или опустить. Вашу карту следует поправить. Вообще, Вы манипулируете публикой. Для этой красной точки получаем отличное соответствие для удаленных валунов как для 5872, так и 5873. Отход же от этого положения к "черной букашки" потребует введение и обоснование высоты местности. А последнее доказать не просто. Хорошая уловка!
Примем положение "черной букашки" за SWC. Тогда угол между SWC и "+Y" по карте составит 5,87 градусов. Ошибка 1%. Но! Из-за изменения положения SWC изменится угол между SWC и валуном t3. Он составит 13,99 градусов. В то время как по официальным снимкам этот угол составляет 15,12 градусов. Ошибка карты 8%. Можно воспользоваться координатой Z или высотой местности для валуна t3, чтобы уменьшить ошибку. При высоте 5,28 метров, угол по карте будет 15,12 градусов. Очевидно, это Вы и делаете. Однако, введение рельефа полезно обосновать.
Перехожу к снимку AS11-40-5873! Поворот к горизонту на 2,8 гр.
Снимок AS11-40-5873. Красными точками обозначены реперные точки, между которыми определяются углы. Просмотреть с разрешением 3900х3900.
Ниже координаты для снимка AS11-40-5873 (10 мм = 740 пикселей):
По AS11-40-5873 угол между центрами лап лунного модуля "-Z" и "+Y" составляет 3,79 градуса. По Вашей карте угол составит 3,98 градусов. Ошибка карты вблизи ЛМ составит 5%! А Вы говорите о точности 3 см.
По AS11-40-5873 угол между SWC и валуном t3 составляет 15,25 градуса. По Вашей карте с учетом высоты фотокамеры 1,37 м над SWC угол составит 17,22 градусов. Ошибка карты составит 13%!.
Данное значение угла зависит от высоты валуна или рельефа местности, что может быть использовано, как свободный подгоночный параметр. Например, при высоте местности валуна t3 над основанием SWC равном 5,28 м, данный угол по карте составит 16,68 градусов. Ошибка карты будет 3,2%.
Вениамин, какие у Вас высоты валунов t1-t4 и камер 5913, 5936, 5887 относительно основания SWC? Обосновать их можете?
> По снимку AS11-40-5862. Если Вам не нужны базовые размеры ЛМ, тогда ясно и кратко опишите, как Вы составляете систему уравнений
Никак.
> какие основные параметры
Реперные точки на комплекте снимков, сделанных из разных ракурсов; фокусные расстояния камер; размеры сканов; координаты центров снимков; базовый размер.
> в какой среде происходит поиск оптимального решения
В программе ImageModeler. По какому это кругу мы уже бежим?
> какая задается точность решения
Точность не задается, а обеспечивается.
> в Ехсеl (чтобы не строить догадки)?
Ехсеl не участвует.
> По валуну w. Вы не точны - этот валун есть на снимках 5872, 5873 и 5913. Вам этого не достаточно для нахождения координат? Или не можете отождествить с ЛРОС?
Этого недостаточно для нахождения координат с разумной точностью. Отождествить с ЛРОС не только могу, но и отождествил. Снова по третьему кругу побежим?
> По поводу поворота снимка к истинному горизонту. Это аккуратный подход.
Это бессмысленный подход.
> Любой читатель сможет визуально по снимку оценить ландшафт, наклон ЛМ, положение его опорных лап, кратеров, валунов...
Это можно сделать и без поворота снимка. Поворот ничего не меняет ни в положениях, ни в углах.
> Нет обманчивых визуальных ощущений.
Мы проводим измерения, а не доверяемся "обманчивым визуальным ощущениям". На измерениях поворот не сказывается.
> Кроме того, не будут накапливаться субъективные ошибки при изучении снимков.
Мы проводим объективные измерения по пикселям, и субъективные ошибки не играют в них никакой роли. Поэтому нет смысла чего-то вращать.
> Если же Вам удобно работать с повернутыми снимками, то ради бога.
Наоборот, мне удобнее работать с НЕповернутыми снимками. Поэтому прошу Вас ничего не поворачивать и приводить координаты по неповернутым снимкам. В крайнем случае, если Вы что-то вращаете, будьте добры выкладывать повернутый файл, чтобы я мог пользоваться тем же файлом, что и Вы.
> По поводу Вашей считалки, я сразу же от нее отказался. Ибо использование сферической тригонометрии в считалке, когда можно использовать простую теорему Пифагора - это очевидно не ясный подход и плохой тон для широкой публики.
Поначалу Вы вообще не умели считать правильно. Но сейчас, с моей помощью, научились. Это похвально. Мне неважно теперь, каким методом Вы считаете. Ваш способ ничем не лучше моего. Главное, чтобы результат был правильным. Моя считалка дает правильный результат, и я ей пользуюсь. Если Вы будете считать правильно, Вы придете к тем же самым результатам, что и я.
> По 5872. Вы снова не аккуратны! Есть общепринятые стандарты обозначений и их первоочередность на картах. Очевидно, что если красным обозначен SWC, то и точка будет красной - никак черной букашкой рядом с жирной красной точкой.
Никаких стандартов в отношении обозначений SWC и SCS1 не существует. SWC представляет из себя легко узнаваемую на фотографиях вещь, и ее проекция сверху (а моя карта дает проекцию сверху с сохранением соотношений линейных размеров) тоже вполне узнаваема. Поэтому эта проекция на карте НАРИСОВАНА. А SCS1 - это не вещь какая-нибудь, это просто место. И это место обозначено жирной (чтоб было заметно на фоне камней) точкой. Не списывайте свои ошибки на мои, не валите с больной головы на здоровую.
> Ну а SCS1? Этого вовсе нет в миссии Аполлон-11.
Как же нет? В А-11 были сделаны два Soil Core Sample, забора образца грунта в виде керна в двух близких местах. Забор первого из них отображен на фотографиях 5963/64, и это место я отметил как SCS1. В ключе к карте это написано прямым текстом.
> Есть ALSCC-1 - стереокамера! Значение ALSCC для фотограмметрии второстепенное, можно было выполнить малым шрифтом или вовсе опустить. Вашу карту следует поправить.
> Вообще, Вы манипулируете публикой. Для этой красной точки имеем отличное соответствие для удаленных валунов как для снимка 5872, так и 5873. Отход же от этого положения к "черной букашки" для оптимального согласия значений потребует введение и обоснование высоты местности.
Ничего не понимаю. Какое отношение "соответствие для удаленных валунов" имеет к этой точке? Эта точка - место на карте. Мы имеем для него такое же хорошее соответствие, как и для всех других точек. Я никуда от этой точке к "черной букашке" не отходил, потому что эта точка к "черной букашке" имеет лишь то отношение, что и SWC, и SCS - эксперименты А-11. При чем тут высота местности, тоже непонятно. Вы как будто бредите наяву.
> А последнее доказать, а позже подтвердить с орбиты снимками с большим разрешением, не просто. Хорошая уловка!
Непонятно, что там непросто "доказать, а позже подтвердить". Высота положений объектов - такая же неотделимая характеристика их положений, как проекция их положений на горизонталь. В 3-мерном пространстве положение объекта характеризуется 3 координатами, и третья координата столь же существенна, как другие две. И все три координаты получаются из фотограмметрии. Правильность их получения доказывается хорошим согласием между расчетными координатами и фотографиями. О каких уловках Вы говорите?
> Примем положение "черной букашки" за SWC.
Не надо одолжений. То, что Вы называете "черной букашкой", и есть положение SWC, изображенное на моей карте. А заодно и размер его проекции.
> Тогда угол между SWC и "+Y" по Вашей карте составит 5,87 градусов. Ошибка 1%.
Не 5,87, а 6,16 градусов, как следует из координат, по которым построена карта, и из самой карты. Это очень легко проверить по карте. Вам сделать увеличенную копию? Так что погрешность - сотые доли градуса, глубоко в пределах обозначенной точности.
> Но! Из-за изменения положения SWC изменится угол между SWC и валуном t3. Он составит 13,99 градусов (при возвышении на 1 метр). В то время как по официальным снимкам этот угол составляет 15,12 градусов. Ошибка карты 8%.
Ничего подобного нет и в помине. Я могу в цифрах и координатах доказать, что это не так.
> Можно воспользоваться координатой Z или высотой местности для валуна t3, чтобы уменьшить ошибку. При высоте 5,28 метров, угол по карте будет 15,12 градусов. Ошибка нулевая! Очевидно, это Вы и делаете. Однако, введение рельефа полезно ясно обосновать.
Я не ввожу никакого рельефа. Я определяю все 3 координаты каждого из объектов. В моей координатной системе координата Z валуна t3 составляет 6,18 метров, но это не имеет никакого отношения к рельефу. Как я уже сказал, моя координатная система такова, что ось Z направлена вдоль штока SWC. Однако шток SWC не совпадает с местной вертикалью (это легко показать и доказать), он слегка наклонен как в направлении север-юг, так и в направлении запад-восток. Величина наклона - первые единицы градусов. В результате координата Z объектов имеет систематическое отличие от их высоты, изменяясь пропорционально синусу наклона штока. Каждые 100 метров дают максимально, при 1-градусном наклоне, дополнительные 100*sin(1)=1,6 метра высоты. Так что не удивительно, что дальние объекты имеют в моей координатной системе координату Z, на метры отличающуюся от их высоты над нулевым уровнем местности (где он, кстати, этот нулевой уровень?)
> Перехожу к снимку AS11-40-5873! Поворот к горизонту на 2,8 градуса.
Не надо вращать снимок! Не надо! А если вращаете, давайте ссылку на повернутую картинку! Следующий раз не буду ничего проверять, если недоступна та картинка, по которой Вы определяете координаты.
> Ниже координаты для снимка AS11-40-5873 с разрешением 3900х3900 (10 мм = 740 пикселей): > центр снимка = 1953/1972 > "-Z" = 1974/1806 > "+Y" = 2196/2013
Координаты на НЕПОВЕРНУТОМ исходном скане: центр снимка = 1951/1972 "-Z" = 1986/1787 "+Y" = 2204/2002
> Ниже координаты по карте (масштаб 1 м = 36 пикселей, смотреть с разрешением 6808х3118): > камера 5873 = 742/647 > "-Z" = 1238/992 > "+Y" = 1049/886
У Вас и здесь небольшие ошибки. Любой может открыть Вашу карту и убедиться, что действительные координаты таковы (при учете высоты камеры 1,37 метра и высот опор ЛМ):
Координаты центров опор, напоминаю, совпадают с нарисованными на них красными точками.
> По AS11-40-5873 угол между центрами лап лунного модуля "-Z" и "+Y" составляет 3,79 градуса. > По Вашей карте угол составит 3,98 градусов.
По снимку я получаю 3,80 градусов, а по карте я получаю 3,83 градуса. Разница всего 3 сотых градуса! Совсем ничтожная разница. Как Вы умудрились по карте получить 3,98 градуса? Вы опять где-то ошиблись. Наверное, это у Вас из-за неточного обозначения координат на карте. При малых углах даже небольшое изменение координаты может изменить угол на десятую градуса. С ПРАВИЛЬНЫМИ координатами (по которым построена карта) совпадение оказывается в сотые доли градуса.
> Ошибка карты вблизи ЛМ составит 5%! А Вы говорите о точности 3 см.
На самом деле пользоваться относительными погрешностями при таком малом значении вообще нельзя. Точность карты вблизи ЛМ - лучше, чем десятые доли градуса. Даже Вы, пользуясь не очень точными координатами, получили точность в 0,2 градуса (хотя карта на самом деле точнее). Эта абсолютная погрешность свойственна ВСЕМ измеряемым углам. Даже если сам угол равен 0,2 градуса или даже 0 градусов, абсолютная погрешность одна и та же. Какой смысл будет делить 0,2 на 0? Будет бесконечная относительная погрешность. Но она никакого смысла не имеет, роль играет АБСОЛЮТНАЯ погрешность. Абсолютная погрешность в 0,2 градуса - это 3 сантиметра на расстоянии 10 метров, или 10 сантиметров на расстоянии 30 метров. Собственно, я о таком порядке величины и говорю: моя карта имеет именно такой порядок величины погрешности в 30-метровой окрестности модуля. О чем речь, о чем разговор? Даже с неточно измеренными координатами Вы получаете тот же порядок погрешности, что и я.
> По AS11-40-5873 угол между SWC и валуном t3 составляет 15,25 градуса.
Координаты валуна на неповернутом снимке (927; 1171), штока SWC (1594; 2413). Выходит угол 17,11 градусов. Выходит, Вы снова неправильно посчитали.7
> По Вашей карте с учетом высоты фотокамеры 1,37 м над SWC угол составит 17,22 градусов.
Вы получили с точностью до 0,1 градус то самое значение, что следует из снимка 5873. Даже проверять не буду.
> Ошибка карты составит 13%!.
Как видим, погрешность карты опять в пределах десятой градуса (а если бы я перепроверил координаты по карте, то наверняка получил бы единицы сотых градуса).
> Данное значение угла зависит от высоты валуна или рельефа местности, что может быть использовано, как свободный подгоночный параметр.
У меня нет никаких высот валуна и рельефа местности, у меня есть только три координаты объекта в 3-мерном пространстве.
> Например, при высоте местности валуна t3 над основанием SWC равном 5,28 м, данный угол по карте составит 16,68 градусов. Ошибка карты будет 3,2%.
Координаты валуна t3 в моей КС есть (-105,14; 74,72; 6,18), но последняя координата не есть, строго говоря, высота валуна, поскольку, повторяю, ось Z в моей КС не совпадает с местной вертикалью.
> Вениамин, какие у Вас высоты валунов t1-t4 и камер 5913, 5936, 5887 относительно основания SWC? Обосновать их можете?
К сожалению, у меня вообще нет никаких высот. У меня есть по три координаты каждого объекта, если хотите, я назову те, что Вы просите. Соответственно обосновать высоты я не могу, потому что невозможно обосновать того, чего у меня нет. Увы, из одной только фотограмметрии невозможно найти положение местной вертикали, т. к. в кадре нет ни одного строго вертикального или строго горизонтального объекта. Можно лишь найти приближение к этой вертикали. В качестве первого приближения можно использовать ось штока SWC, т. е. координату Z в моей сцене. По независимым данным можно полагать, что наклон штока не превышает, скажем, 4 градусов к местной вертикали. Это дает отклонение значений Z от местных высот в пределах десятков сантиметров в ближайшей окрестности модуля, и отклонения в несколько метров на расстояниях порядка ста метров от него.
> Если же Вы настаиваете и хотите проводить горизонт через разметочные кресты фотокамеры Хасселя, тогда имеем очередное противоречие НАСА. Яркий пример:
Я не хочу проводить горизонт через разметочные кресты. Я вообще не собираюсь проводить горизонт. Это не нужно для наших задач.
И еще раз обращаю Ваше внимание на то, что Вы совершенно не понимаете смысла того, что считаете. Раньше Вы не умели даже считать. Сейчас Вы научились считать (кажется), но понимать смысл посчитанного Вы до сих пор не научились. Иначе бы Вы не заявляли такого:
> Ошибка карты вблизи ЛМ составит 5%! А Вы говорите о точности 3 см.
Вы вообще не осознаете связь между процентами и абсолютными величинами, между абсолютной и относительной погрешностью. Возьмем то же расстояние между центрами опор Y и -Z на изображении 5873. Опора Y находится в ~10,9 метрах от камеры. Если ее положение определено расчетом с ошибкой хотя бы 3 сантиметра - ее видимое отклонение от расчетного составит 3/1000 радиан, или 0,2 градуса. Вы получаете из карты расхождение в 0,2 градуса - и начинаете недовольно возмущаться. Вы попросту НЕ ПОНИМАЕТЕ, что 0,2 градуса в данном случае и означают примерно 3-сантиметровую ошибку, и никак иначе. Вы же зачем-то делите эту абсолютную погрешность в 0,2 градуса на сам угол (???) и пытаетесь придать полученной цифре какое-то абсолютное значение. Совершеннейшая бессмыслица. А если бы измеряемый угол был 0,1 градус - Вы бы заявили о 200-процентной ошибке? Чушь ведь.
Попробуйте все-таки понять, что, скажем, если объект находится в 2 метрах от камеры, то при 3-сантиметровой ошибке его видимое отклонение от расчетного значения может составить даже целый градус. И никогда не пытайтесь искать относительную ошибку для ГРАДУСНОЙ меры. Относительная ошибка для градусной меры БЕССМЫСЛЕННА В ПРИНЦИПЕ, если только мы не имеем дела с нарастающим углом. В данном случае мы не имеем дела с нарастающим углом, 0 градусов ничем не лучше и не хуже 350 градусов, и нет никакого смысла относить угловую погрешность к какому-либо значению угла.
На протяжении почти двух месяцев в который раз спрашиваю об одном и том же и Вы плаваете. Без ответа на этот вопрос на любой научной конференции к Вашим выступлениям отнесутся как к начинающему студенту Шурику. Вы до сих пор не можете дать систему уравнений, которую решаете. Не можете ответить о погрешности и о методе оптимизации решения...
Это же основа для обсуждения!
Для себя такую систему уравнений составил, решил. Точное решение составлено для камер 5850, 5872, 5873, 5887 для валунов t1-t4. Решение в Excel, приближение Ньютона, максимальная ошибка 0,8% в градусах, т.е. точность решения более чем на порядок выше, чем у Вас. Получил координаты Х, У и Z для каждого валуна...
Предварительный вывод такой: у Вас погрешности для валунов t1-t4 относительно ЛМ чудовищно плавает от нескольких процентов до нескольких десятков. От точного решения Вы далеко отходите! Играя с погрешностью, Вы подбираете удобный результат под LROS для ФАЛЬСИФИКАЦИИ результатов! Ибо валуны можно поместить так, как на снимках с орбиты LROS.
Перехожу к снимку AS11-40-5850! Поворот к горизонту 0 гр.
Снимок AS11-40-5850. Красными точками обозначены реперные точки, между которыми определяются углы.
Ниже координаты для снимка AS11-40-5850 (10 мм = 735 пикселей):
центр снимка = 1947/1954
"-Y" = 1902/1954
t2 = 952/978
t3 =1158/964
t4 = 1432/982
Координаты по карте те же, что указаны выше, для камера 5850 координаты = 914/1078.
Получаем
По AS11-40-5850 угол между лапой лунного модуля "-Y" и t2 составляет 18,58 градуса. По Вашей карте угол с учетом Вашей высоты валуна 6,1 м составит 17,51 градусов. Ошибка карты составит 6%!
По AS11-40-5850 угол между лапой лунного модуля "-Y" и t3 составляет 17,33 градуса. По Вашей карте с учетом высоты валуна 6,1 м угол составит 15,94 градусов. Ошибка карты составит 9%!
Для математики такие положения камер и координат валунов (включая высоту) очень грубые.
> На протяжении почти двух месяцев в который раз спрашиваю об одном и том же и Вы плаваете. Без ответа на этот вопрос на любой научной конференции к Вашим выступлениям отнесутся как к начинающему студенту Шурику. Вы до сих пор не можете дать систему уравнений, которую решаете. Не можете ответить о погрешности и о методе оптимизации решения...
Олег, дорогой мой человек, сколько же можно наматывать одни и те же круги, как слепой пони? Вы уже по какому кругу побежали, по пятому? Сколько Вам повторять одно и то же? Я уже сколько раз говорил Вам:
Я НЕ РЕШАЮ НИКАКОЙ СИСТЕМЫ УРАВНЕНИЙ.
Буквально в одном из последних сообщений, http://ligaspace.my1.ru/news/2011-06-23-314#ent2305 , я уже не знаю в какой раз Вам это повторил. А Вы опять по новому кругу. Ну сколько же можно, Олег? Давайте я еще пять раз повторю:
Я НЕ РЕШАЮ НИКАКОЙ СИСТЕМЫ УРАВНЕНИЙ. Я НЕ РЕШАЮ НИКАКОЙ СИСТЕМЫ УРАВНЕНИЙ. Я НЕ РЕШАЮ НИКАКОЙ СИСТЕМЫ УРАВНЕНИЙ. Я НЕ РЕШАЮ НИКАКОЙ СИСТЕМЫ УРАВНЕНИЙ. Я НЕ РЕШАЮ НИКАКОЙ СИСТЕМЫ УРАВНЕНИЙ.
Так понятно, так доходчиво? Или еще нет? Скажите, сколько раз Вам нужно повторить, чтобы Вы поняли, и я скопирую нужное число раз. Или Вам ни с какого раза непонятно, и еще через месяц и два Вы снова будете спрашивать у меня, какую систему уравнений я решаю?
То же и с погрешностью, и с оптимизацией. Я уже несколько раз Вам отвечал. Вам скопировать мои старые ответы? Или дать ссылки на них? Или что? Сколько Вы будете носиться по этому замкнутому кругу?
> Это же основа для обсуждения!
Нет, Олег. Основа для обсуждения - это построенная фотограмметрическими методами 3-мерная сцена, содержащая координаты всех нужных объектов и вращения камер.
> Для себя такую систему уравнений составил, решил. Точное решение составлено для камер 5850, 5872, 5873, 5887 для валунов t1-t4. Решение в Excel, приближение Ньютона, максимальная ошибка 0,8% в градусах, т.е. точность решения более чем на порядок выше, чем у Вас. Получил координаты Х, У и Z для каждого валуна...
В том-то и дело, что "для себя". Никто никогда Вашего решения не увидит, хоть я давным-давно уже просил у Вас изобразить Ваши положения объектов на карте. И Вы каждый раз обещали, и ни разу своего обещания не сдержали. И не сдержите. И никто никогда не узнает Ваших координат валунов и камер. Еще бы, ведь проверить их так просто. И Вы знаете, что проверить их просто, а потому никогда их не напишете, чтобы Вас нельзя было проверить.
> Предварительный вывод такой: у Вас погрешности для валунов t1-t4 относительно ЛМ чудовищно плавает от нескольких процентов до нескольких десятков. От точного решения Вы далеко отходите!
Никто никогда не сможет Вашего вывода проверить, потому что Вы свое решение никогда не напишете. Вы предлагаете верить Вам на слово - что ж, может, кто и захочет Вам поверить на слово. Но мое-то решение всегда можно проверить, потому что я даю координаты по первой просьбе. И все проверки до сих пор показывали, что мое решение ОЧЕНЬ точно.
> Играя с погрешностью, Вы подбираете удобный результат под LROS для ФАЛЬСИФИКАЦИИ результатов! Ибо валуны можно поместить так, как на снимках с орбиты LROS.
Какая же тут игра с погрешностью? Погрешность у меня заявленная, не хуже 5 % (а скорее, лучше 3 %) для валунов t1-t4. И уж конечно, мое решение находится в полном соответствии со снимками ЛРО и со снимками А-11.
> Вы художник фальсификатор НАСА с языком софиста!
И снова пустые обвинения без единого подтверждения. Сколько их уже было, пустых обвинений? И сколько еще будет? А подтверждений до сих пор не было. И не будет, это уже очевидно всем, я думаю.
А что ж про 5872 и 5873 забыли? Не хотите продолжать? Вам нечего возразить? Вы увидели свои ошибки, на которые я указал, и по существу возразить не можете? А признать свои ошибки явно и сказать об этом не находите в себе сил? Ну хорошо, не хотите признавать явно - и не надо. Переход к другой камере, очевидно, сам по себе уже является таким признанием. Нужно зафиксировать тогда только, что Вы не смогли найти никаких расхождений по снимкам 5862, 5872, 5873, а все, что Вам казалось расхождениями, на поверку оказалось ВАШИМИ ошибками.
ОК, вот теперь переходим к 5850.
> Поворот к горизонту 0 гр.
Это утешает.
> Ниже координаты для снимка AS11-40-5850 (10 мм = 735 пикселей): > центр снимка = 1947/1954 > "-Y" = 1902/1954 > t2 = 952/978 > t3 =1158/964 > t4 = 1432/982
Исправим цифры. Как Вы могли для -Y получить 1902/1954 ??? Это у Вас опечатка, очевидно, вторая координата взята от центрального креста. На самом деле у меня репер это опоры поставлен на 1839/2074. Конечно, это чуть-чуть выше действительного узла крепления, но так уж был исходно поставлен репер. Можно, конечно, отметить точку и пониже, но тогда и на карте положение слегка сдвинется. У Вас, наоборот, точка поставлена слишком низко: т. к. камера смотрит на опору вниз, то луч зрения пересечется с центром опоры еще ниже узла крепления, она вообще под опорой в грунте.
Остальные цифры даже не поправляю, хотя у меня координаты реперов слегка отличаются. Но камень имеет свою ширину, так что реперную точку можно выбирать.
> Координаты по карте те же, что указаны выше, для камера 5850 координаты = 914/1078.
Для камеры 5850 координаты имеются в количестве 3 штук, дорогой Олег. В метрах это будет (4,93; 4,14; 1,66).
> По AS11-40-5850 угол между лапой лунного модуля "-Y" и t2 составляет 18,58 градуса.
Нет, Олег. Если брать тот репер опоры -Y, что брал я, то угол будет 17,20 градусов даже с Вашими координатами валунов.
> По Вашей карте угол с учетом Вашей высоты валуна 6,1 м составит 17,51 градусов.
Даже не буду проверять. Ну или ладно, проверю по координатам валуна (-95,26; 62,54; 5,34), опоры (0,00; 8,49; 0,33) и камеры (4,93; 4,14; 1,66). Выходит 17,30 градусов. Ну, опять почти идеальное совпадение. Точность 7 сотых градуса, и то в основном потому, что Вы выбрали чуть другую точку на валуне.
Конечно, можно пересчитать и с той точкой на опоре -Y, которую выбрали Вы (1902/2148). Для нее угол действительно будет такой, как Вы назвали, но и на карте у нее будут другие координаты, а именно (0,12; 8,50; 0,22). Т. е. эта точка находится на 16 см дальше от той, что обозначена на карте (в проекции на карту - на 12 см).
> Ошибка карты составит 6%!
Вы опять пытаетесь искать относительную ошибку УГЛА? Опять, как пони, побежали на второй круг? Я же Вам уже рассказывал, что так делать нельзя. И подробно рассказывал: http://ligaspace.my1.ru/news/2011-06-23-314#ent2312 . Вы так и не сумели понять, бедняга?
> По AS11-40-5850 угол между лапой лунного модуля "-Y" и t3 составляет 17,33 градуса.
По моему реперу опоры - 16,00 градусов.
> По Вашей карте с учетом высоты валуна 6,1 м угол составит 15,94 градусов.
Хоть Z-координата валуна на самом деле 5,34 м, но все равно совпадение получилось в 6 сотых градуса. Прекрасное совпадение!
> Ошибка карты составит 9%!
Нет. Ошибка карты - сотые доли градуса. Как и везде. Если хотите проверить с Вашей реперной точкой опоры -Y - пожалуйста. Сдвиньте красную точку -Y на карте на 12 сантиметров к западу вдоль оси, перпендикулярной линии -Y -- +Y, и проверьте.
> Для математики такие положения камер и координат валунов (включая высоту) очень грубые.
Ну почему же? Несколько сотых долей градуса - весьма хорошее совпадение. Очень хорошее, я бы сказал.
На словах у Вас всё точно! Пока по указанным координатам для AS11-40-5850 (сообщение 28) у Вас есть ошибки, которые выходят за заявленную точность.
Перехожу к снимку AS11-40-5887! Поворот к горизонту 0 гр.
Снимок AS11-40-5887. Красными точками обозначены реперные точки, между которыми определяются углы.
Ниже координаты для снимка AS11-40-5887 (10 мм = 741 пикселей; f=61,51):
центр снимка = 1956/1965
"-Y" = 2066/862
t1 = 3002/62
t2 = 3078/66
t3 = 3316/44
t4 = 3608/46
Координаты по карте те же, что указаны выше в сообщение 19, для камеры AS11-40-5887 координаты = 574/1170.
Получаем
По снимку угол между лапой лунного модуля "-Y" и t1 составляет 13,87 градуса. По Вашей карте угол с учетом высоты валуна 5,3 м составит 12,45 градусов. Ошибка карты составит 11%!
По снимку угол между лапой лунного модуля "-Y" и t3 составляет 16,69 градуса. По Вашей карте с учетом высоты валуна 5,3 м угол составит 15,55 градусов. Ошибка карты составит 7%!
Ошибка так же есть для углов "-Y"-t2 и "-Y"-t4!
Для снимка и камеры AS11-40-5887 получаем ошибки, которые выходят за заявленную точность. Точного математического решения для положений камер и координат валунов нет.
> Пока по указанным координатам для AS11-40-5850 (сообщение 28) у Вас есть ошибки, которые выходят за заявленную точность.
Но Вы никогда эти ошибки не укажете и не сможете. Ни одну из моих цифр Вы оспорить не в состоянии, а можете только продолжать разбрасываться пустыми обвинениями, за которыми абсолютно ничего не стоит.
> Перехожу к снимку AS11-40-5887!
То есть ни одной цифры по 5850 Вы оспорить не в состоянии, а потому спешите перейти к следующему снимку, заметя под ковер мусор. Хорошо, так и отметим:
Вы не смогли найти ни одной ошибки по камерам 5865, 5872, 5873, 5850, а все якобы "невязки", к которым Вы пытались придраться, оказались на поверку ВАШИМИ ошибками.
Зафиксировали.
> Ниже координаты для снимка AS11-40-5887 (10 мм = 741 пикселей; f=61,51): центр снимка = 1956/1965 > "-Y" = 2066/862 > t1 = 3002/62 > t2 = 3078/66 > t3 = 3316/44 > t4 = 3608/46 > Координаты по карте те же, что указаны выше в сообщение 19, для камеры AS11-40-5887 координаты = 574/1170.
У меня цифры чуть другие, ну да это мелочь, пускай.
> Получаем > По снимку угол между лапой лунного модуля "-Y" и t1 составляет 13,87 градуса.
Годится.
> По Вашей карте угол с учетом высоты валуна 5,3 м составит 12,45 градусов.
Ничего подобного. Не знаю, откуда Вы берете координаты Z, но к моей карте прилагаются МОИ координаты Z. Для валуна t1 это 6,57 метра, а для камеры 5887 - 2,36 метра. В пикселях это будет для камеры 5887 (574; 1170; 85), для валуна - (6708; 2440; 237). Этому соответствует угол 13,87 градуса.
Так что совпадение с фотографией ПОЛНОЕ. Что и требовалось доказать.
Олег, я не хочу Вас обидеть, но Вы что, тупой?! Я Вам детально объяснил несколько раз - и очень подробно в сообщении 26 http://ligaspace.my1.ru/news/2011-06-23-314#ent2312 - что относительную ошибку УГЛА (если только это не промежуток углов) определять НЕЛЬЗЯ. В сообщении 30 я Вам это повторил. Вы что, не поняли? Сколько раз Вам нужно повторить, чтобы Вы поняли? Ну давайте я скопирую пока 5 раз:
Относительную ошибку можно определять ТОЛЬКО для приращения угла. Для абсолютного угла НЕЛЬЗЯ. Угол в 10 градусов равен углу в 370 градусов, углу 730 градусов и так далее. Делить погрешность на 10 градусов ничем не лучше, чем делить на 370 или на 730 градусов. Давайте повторю еще 5 раз на всякий случай, чтоб Вы поняли:
> По снимку угол между лапой лунного модуля "-Y" и t3 составляет 16,69 градуса.
Пускай.
> По Вашей карте с учетом высоты валуна 5,3 м угол составит 15,55 градусов. Ошибка карты составит 7%!
На самом деле координата Z валуна 6,18 метров, и угол (при учете высоты камеры 2,36 метра) составляет ок. 16,67 градуса. Разница с углом по снимку - несколько сотых градуса. Ничтожная величина.
> Ошибка так же есть для углов "-Y"-t2 и "-Y"-t4!
Ничтожная погрешность есть, конечно. Несколько сотых градуса.
> Для снимка и камеры AS11-40-5887 получаем ошибки, которые выходят за заявленную точность.
Ничего подобного. Опять, как и прежде, все погрешности не превышают сотых градуса.
> Точного математического решения для положений камер и координат валунов нет.
Как же нет, если есть? Координаты камеры 5887 (14,80; 4,07; 2,36). Координаты валунов t1 - t4: t1: (-139,82; 83,28; 6,57) t2: (-95,26; 62,54; 5,34) t3: (-105,14; 74,71; 6,18) t4: (-96,89; 78,20; 6,03)
Венимамин, хотел поиграть дольше. И уточнить свое решение системы уравнений. Да, ладно. Король у Вас все равно голый!
Вы наверное так и не поняли или просто зашорены защитой НАСА. Речь идет об ошибках и о Вашей художественной подгонке положений объектов на карте Аполлон-11.
О том, как Вы не аккуратно считаете показывает пример сообщение 33: "...для камеры AS11-40-5887 координаты = 574/1170. Пускай. ...По снимку угол между лапой лунного модуля "-Y" и t1 составляет 13,87 градуса. Годится. ...Не знаю, откуда Вы берете координаты Z, но к моей карте прилагаются МОИ координаты Z. Для валуна t1 это 6,57 метра, а для камеры 5887 - 2,36 метра. В пикселях это будет для камеры 5887 (574; 1170; 85), для валуна - (6708; 2440; 237). Этому соответствует угол 13,87 градуса. Так что совпадение с фотографией ПОЛНОЕ. Что и требовалось доказать."
Проверим Вас, подставив означенные значения
расстояние от камеры до лапы "-Y" =((1129-574)^2+(1180-1170)^2+(85-0)^2)^0,5/36=15,599 м
расстояние от камеры до валуна "t1" =((6708-574)^2+(2440-1170)^2+(85-237)^2)^0,5/36=174,054 м
расстояние между лапой "-Y" и "t1" =((1129-6708)^2+(1180-2440)^2+(0-237)^2)^0,5/36=159,012 м
тогда угол между лапой "-Y" и "t1" при основании камеры =(180/3,14)*ACOS(((15,599^2)+(174,054^2)-(159,012^2))/(2*15,599*174,054))=14,667 градусов!
14,667 градусов! Как Вы насчитали 13,87 градуса?! Ошибка Ваших расчетов составит 6%!
В целом у Вас положение валунов t1-t4 такое, что существуют ошибки углов от нескольких до десятков процентов. Этим Вы пользуетесь для фальсификации результатов.
Для точного определения координат объектов решалась система нелинейных уравнений. В систему уравнений подставлялись данные углов, которые определялись по официальным снимкам Аполлон-11 с погрешностью до 0,5%, использовались начальные положения камер и лунного модуля по карте (масштаб 1 м = 36 пикселей, разрешение 6808х3118) для их варьирования. Ниже приведено решение для валунов t1-t4.
Иллюстрация поиска решения для системы нелинейных уравнений в среде Excel, метод Ньютона, сходимость 0,0001, относительная погрешность 0,0001%. Указаны координаты валунов t1-t4 в пикселях для карты положений камер и артефактов Аполлон-11.
Решение дает отклонение не более чем на пол-процента от фактических данных. Средняя относительная погрешность составляет 4 сотых процента. Углы между реперными точками и валунами t1-t4 на два порядка точнее, чем у Вас и по Вашим координатам. Ваши, Вениамин, ошибки по реперным углам привожу:
Подстановка координат В.-В. Пустынского в систему уравнений фотограмметрии для Аполлон-11 и определение относительной и абсолютной ошибки взаимных положений камер, лунного модуля и валунов t1-t4. Относительная ошибка до 10%, средняя абсолютная погрешность более 2,5%.
У Вас, Вениамин, все положения валунов определены грубо и имеют отклонения, выходящие за заявленную точность 2-5%. Точное решение вблизи Ваших координат валунов в радиусе 1, 4 и 10 м отсутствует. Лишь в радиусе 15 и варьирование положений камер есть более аккуратное решение. В этом случае средняя ошибка составит 6 сотых процента, максимальная относительная ошибка - составит 2%.
Со средней же относительной ошибкой 3% для координат валунов t1-t4 решений существует множество через каждый сантиметр, размещать такую группу можно от 80 до 200 метров. Пример положений t1-t4 в пределах 100 метров от лунного модуля.
Карта с положением валунов t1-t4 относительно лунного модуля со средней погрешностью до 3%. Обозначено темно-зелеными точками положение валунов до 100 метров и темно-красными точками - в соответствии с LROS для мистификации. Карта Аполлон-11 наложена на официальный снимок LROS, черно-белые точки - это дальние валуны t1-t4. Масштаб на иллюстрации равен 20 м.
Привожу карту положений удаленных объектов t1-t4, для которых средняя относительная ошибка в 70 раз меньше Ваших!
Карта с положением валунов t1-t4 относительно лунного модуля: темно-зелеными точками обозначено решение системы нелинейных уравнений с относительной погрешностью не более 0,5%; темно-красными точками обозначены положения с относительной погрешностью 10% или мистификация под снимки LROS. Карта Аполлон-11 наложена на официальный снимок LROS, черно-белые точки - это дальние валуны t1-t4. Масштаб на иллюстрации равен 20 м.
Любое варьирование данного положения приводит к увеличению относительной и средней погрешности. Можно видеть, что согласно фотограмметрии снимков AS11-40-5850, AS11-40-5872, AS11-40-5873, AS11-40-5887, AS11-40-5888, AS11-40-5913 и AS11-40-5936 положение валунов не совпадает с орбитальными снимками LROS (2009-2011 г.) ни по характеру рисунка, ни по взаимным расстояниям!
Фотограмметрия так же указывает на противоречие официальных снимков. При точном решении системы уравнений для удаленного и ближнего ландшафта относительное положение координат камер разное или имеет фотограмметрический излом.
Изменение положения камер 5913 и 5987 для ближнего (синие стрелки) и дальнего ландшафта (зеленые стрелки) согласно фотограмметрии.
Положение ближних объектов на снимках соответствует их на карте, в то время как для удаленного ландшафта, в частности, валунов t1-t4, положение камер изменяется, так как-будто "мнимый астронавт" снимал с другого места. Такой эффект проявляется при наличии заднего фона, например, при съемке киноэкрана, на который проецируется мнимый ландшафт в зависимости от панорамы или станции фотосъемки Аполлон-11. Другими словами, в зависимости от места положения Нила Амстронга и фотосъемки на экран проецируется подготовленный удаленный ландшафт.
Какова причина фотограмметрического излома? Не то это была ошибка актеров - если бы Нил Амстронг остановился на несколько метров дальше для съемки, тогда не было противоречия между ближним и удаленным ландшафтом. Или же была не точность рекомендаций во внутреннем сценарии-журнале. Это могла бы быть ошибка самой микросъемки декорации и перенос ее на киноэкран. Наконец, есть скрытая ошибка в фотограмметрической системе уравнений. Из-за чего появляется разрыв (еще раз проверяю!).
На наличие ярко выраженной границы вблизи валунов t1-t4 указывают официальные снимки миссии Аполлон-11.
Наличие фотограмметрического излома в направлении валунов t1-t4. Подобная выраженная граница существует в разных направлениях относительно лунного модуля Аполлон-11. Подробнее Аполлон 11. Имитация удаленного ландшафта Луны..
Мне становится ясно, почему Нил Амстронг, находясь на гребне Малого Западного кратера в наибольшем удалении от лунного модуля, не снял круговую панораму, ибо за его спиной были валуны t1-t4 - граница имитации лунного ландшафта.
Вы, Вениамин, мистифицировали результат снимков Аполлон-11, а именно карту положений камер, артефактов, кратеров, валунов под снимки с орбиты зондом LROS (2009-2011 г.). В данном случае, пользуясь относительной погрешностью 2-5% удаленных объектов и плюс-минус 30 см по положению координат ближних объектов, Вы разместили валуны t1-t4 так, чтобы результат был близок к LROS. На самом деле, с такой погрешностью валуны можно разместить вблизи лунного модуля. Объективного подхода у Вас не было. В то время как точное решение есть. Получены координаты данных валунов из решения фотограмметрической системы уравнений со средней относительной погрешностью 0,04%. Положение дальнего ландшафта не совпадает со снимками орбитального зонда LROS. Исследования указывают на наличие фотограмметрического излома и подтверждают предположение об использовании киноэкрана для имитации удаленного лунного ландшафта.
Есть смысл уточнить положение камер на основе фоторамметрических уравнений. Возможно, более точное положение камер снимет излом камер для ближнего и дальнего ландшафта.
Другие координаты валунов t1-t4 в пределах расстояния от ЛМ (указаны макс. относительная погрешность и отклонение от среднего или средний разброс погрешности):
Уточняю положение карт. Осталась последняя камера 5913.
Положение камер сдвигается от 0,15 до 0,50 м. У меня максимальная относительная погрешность для углов вблизи ЛМ - 0,007%, средний разброс ошибки составляет 0,00088%.
Вениамин, при Ваших положениях камер максимальная ошибка для тех же угловых азимутов вблизи ЛМ составляет 5,7%, средний разброс - 3,1%. Для удаленного ландшафта те же погрешности и более!
Это в тысячи раз хуже, чем у меня или аккуратном решении!
У Вас очень грубое решение, при котором можно фальсифицировать любой результат современных снимков с орбиты Луны под аполлоновские.
Положение камер уточнил. Решил систему уравнений "+" для валуна W. Отклонение от нулевой погрешности меньше 0,5%. Что соответствует точности фактических данных. Вениамин, у вас отклонение от нулевой погрешности на порядок выше!
Нил Амстронг и миссия Аполлон на Луну - это Эдвин Пири и его экспедиция на Северный полюс!!!
В целом, Вениамин можно сравнивать ваши положения объектов с фактическими углами официальных снимков и реальными координатами, чтобы с точки зрения МАТЕМАТИКИ ПИФАГОРА утверждать о Вашей мистификации!
Я сейчас за другим компьютером и не могу работать с графикой, поэтому пока отвечу лишь на некоторое.
> Проверим Вас, подставив означенные значения расстояние от камеры до лапы "-Y" =((1129-574)^2+(1180-1170)^2+(85-0)^2)^0,5/36=15,599 м > расстояние от камеры до валуна "t1" =((6708-574)^2+(2440-1170)^2+(85-237)^2)^0,5/36=174,054 м > расстояние между лапой "-Y" и "t1" =((1129-6708)^2+(1180-2440)^2+(0-237)^2)^0,5/36=159,012 м > тогда угол между лапой "-Y" и "t1" при основании камеры =(180/3,14)*ACOS(((15,599^2)+(174,054^2)-(159,012^2))/(2*15,599*174,054))=14,667 градусов!
Ай-ай-ай, координата Z для опоры -Y взята 0. Почему она 0? Вы, конечно, можете думать, что она 0, но В МОЕЙ системе коорданат она вовсе не 0. Она 0,33 метра, и я об этом, кстати, писал еще сообщении 30, но Вы этого опять не заметили. Вы опять стали подставлять в формулы свои галлюцинации вместо ПРАВИЛЬНЫХ цифр.
Ваш новый epic fail.
> Ошибка Ваших расчетов составит 6%!
На всякий случай копирую ДВА РАЗА сообщение 34: __________ Олег, я не хочу Вас обидеть, но Вы что, тупой?! Я Вам детально объяснил несколько раз - и очень подробно в сообщении 26 http://ligaspace.my1.ru/news/2011-06-23-314#ent2312 - что относительную ошибку УГЛА (если только это не промежуток углов) определять НЕЛЬЗЯ. В сообщении 30 я Вам это повторил. Вы что, не поняли? Сколько раз Вам нужно повторить, чтобы Вы поняли? Ну давайте я скопирую пока 5 раз:
Относительную ошибку можно определять ТОЛЬКО для приращения угла. Для абсолютного угла НЕЛЬЗЯ. Угол в 10 градусов равен углу в 370 градусов, углу 730 градусов и так далее. Делить погрешность на 10 градусов ничем не лучше, чем делить на 370 или на 730 градусов. Давайте повторю еще 5 раз на всякий случай, чтоб Вы поняли:
Понадобится повторять снова в будущем? Не сомневаюсь. __________ Олег, я не хочу Вас обидеть, но Вы что, тупой?! Я Вам детально объяснил несколько раз - и очень подробно в сообщении 26 http://ligaspace.my1.ru/news/2011-06-23-314#ent2312 - что относительную ошибку УГЛА (если только это не промежуток углов) определять НЕЛЬЗЯ. В сообщении 30 я Вам это повторил. Вы что, не поняли? Сколько раз Вам нужно повторить, чтобы Вы поняли? Ну давайте я скопирую пока 5 раз:
Относительную ошибку можно определять ТОЛЬКО для приращения угла. Для абсолютного угла НЕЛЬЗЯ. Угол в 10 градусов равен углу в 370 градусов, углу 730 градусов и так далее. Делить погрешность на 10 градусов ничем не лучше, чем делить на 370 или на 730 градусов. Давайте повторю еще 5 раз на всякий случай, чтоб Вы поняли:
Не вижу никакого решения. Решение - это список координат. Дайте список координат вида (X, Y, Z) для валунов и камер, которые Вы рассматриваете, а также для центров посадочных опор. Что-то вроде
Ваш скриншот из Экселя совершенно непонятен. Вроде, там есть по три координаты для валунов t1-t4 и для камер 5850, 5887, 5913, но этого мало. Дайте список координат для валунов t1-t4, камер 5850, 5872/73, 5887, 5913, 5916 и для четырех опор.
Когда будут координаты - будет, что проверять. А сейчас у Вас опять безосновательные заявления.
> Ваши, Вениамин, ошибки по реперным углам привожу:
Я тогда снова скопирую сообщение 34: ____________ > Ошибка карты составит 11%!
Олег, я не хочу Вас обидеть, но Вы что, тупой?! Я Вам детально объяснил несколько раз - и очень подробно в сообщении 26 http://ligaspace.my1.ru/news/2011-06-23-314#ent2312 - что относительную ошибку УГЛА (если только это не промежуток углов) определять НЕЛЬЗЯ. В сообщении 30 я Вам это повторил. Вы что, не поняли? Сколько раз Вам нужно повторить, чтобы Вы поняли? Ну давайте я скопирую пока 5 раз:
Относительную ошибку можно определять ТОЛЬКО для приращения угла. Для абсолютного угла НЕЛЬЗЯ. Угол в 10 градусов равен углу в 370 градусов, углу 730 градусов и так далее. Делить погрешность на 10 градусов ничем не лучше, чем делить на 370 или на 730 градусов. Давайте повторю еще 5 раз на всякий случай, чтоб Вы поняли:
> У Вас, Вениамин, все положения валунов определены грубо и имеют отклонения, выходящие за заявленную точность 2-5%.
Опять безосновательное утверждение выходит. Все цифры, что мы проверяли вместе с Вами, совпадали с точностью до нескольких сотых градуса, и Вы не смогли возразить по существу ни в одном случае. Значит, Вы просто разбрасываетесь безосновательными обвинениями.
> Точное решение вблизи Ваших координат валунов в радиусе 1, 4 и 10 м отсутствует.
Как же отсутствует, если мы каждый раз убеждались в точности моих координат? Я Вам цифра за цифрой показывал их точность, Вы ни разу не смогли возразить, а теперь говорите, что решение отсутствует. Нелепость, мой друг.
> Со средней же относительной ошибкой 3% для координат валунов t1-t4 решений существует множество через каждый сантиметр, размещать такую группу можно от 80 до 200 метров.
"Средняя относительная ошибка", как и вообще относительная ошибка абсолютного угла - это абсурд, Олег, такой не может существовать вообще. Это я Вам уже много, много раз повторял. Нужно еще повторить и объяснить?
> Пример положений t1-t4 в пределах 100 метров от лунного модуля.
Когда будет доступ к моему компьютеру, я Вам покажу, что это невозможные положения.
> Карта с положением валунов t1-t4 относительно лунного модуля: темно-зелеными точками обозначено точное решение системы нелинейных уравнений с относительной погрешностью не более 0,5% и средней погрешностью - 0,04%; темно-красными точками обозначены положения с относительной погрешностью 10% и средней погрешностью - 2,7%. ... > Любое варьирование данного положения приводит к увеличению относительной и средней погрешности.
Вот эта карта намного ближе к действительности. Ошибки на ней уже не так велики, всего лишь по десятку метров для каждого валуна, кроме самого дальнего t1. Их, конечно, можно выявить, но это уже не так важно. Важно, что расстояния на этой Вашей карте уже ВЕСЬМА близки к действительным, и расстояния до валунов уже составляют под 100 метров и выше. Если мы сравним этот Ваш новый вариант с Вашей же илл. 17 в http://ligaspace.my1.ru/news/2011-04-10-301 , то увидим, что ничего общего между этими Вашими картами уже нет. И Вы сами ничего не оставили от своего былого утверждения "Мы получаем, что расстояние от "астронавтов" до валунов 75-90 метров". Вы уже сами себя опровергли.
> положение валунов не совпадает с орбитальными снимками LROS (2009-2011 г.) ни по характеру рисунка, ни по взаимным расстояниям!
На Вашей карте можно видеть совсем другое: Ваша карта уже очень похожа на снимки LROS, только расстояния недооценены на десяток-полтора процентов.
> Положение ближних объектов на снимках соответствует их на карте, в то время как для удаленного ландшафта, в частности, валунов t1-t4, положение камер изменяется, так как-будто "мнимый астронавт" снимал с другого места.
Что Вы имели в виду? О какой карте Вы говорите? О моей или о карте из Предварительного отчета? На моей карте мы вместе с Вами видели, что все объекты находятся в полном соответствии с моими положениями камер. Или Вы хотите сказать, что моя карта верно отображает положение ближних объектов, но неверно отображает положение дальних? Но мы с Вами убедились, что это не так.
> Наличие фотограмметрического излома в направлении валунов t1-t4. Подобная выраженная граница существует в разных направлениях относительно лунного модуля Аполлон-11.
Где ж там излом? Не видно никакого излома. Покажите излом-то.
> Вы, Вениамин, мистифицировали результат снимков Аполлон-11, а именно карту положений камер, артефактов, кратеров, валунов под снимки с орбиты зондом LROS (2009-2011 г.). В данном случае, пользуясь относительной погрешностью 2-5% удаленных объектов и плюс-минус 30 см по положению координат ближних объектов, Вы разместили валуны t1-t4 так, чтобы результат был близок к LROS.
Как же "мистифицировал", если карта полностью соответствует и снимкам самого "Аполлона-11", и орбитальным снимкам?
> На самом деле, с такой погрешностью валуны можно разместить вблизи лунного модуля.
Никак нельзя.
> В то время как точное решение есть. Получены координаты данных валунов из решения фотограмметрической системы уравнений со средней относительной погрешностью 0,04%.
Ну вот и приведите эти координаты. И для валунов, и для камер, и для опор.
> Положение дальнего ландшафта не совпадает со снимками орбитального зонда LROS.
Совпадает.
> Исследования указывают на наличие фотограмметрического излома и подтверждают предположение об использовании киноэкрана для имитации удаленного лунного ландшафта.
Не указывают и не подтверждают.
> Есть смысл уточнить положение камер на основе фоторамметрических уравнений.
Хм, это Вы сами с собой разговариваете? Олег, Эхо и ligaspace - это ведь одно лицо?
> Положение камер сдвигается от 0,15 до 0,50 м.
Так Ваши предыдущие карты можно выбросить, что ли? Вы уже стали двигать камеры по полметра? При этом все углы с ближними объектами (на ЛМ) будут меняться на единицы градусов.
> Это в тысячи раз хуже, чем у меня или аккуратном решении!
Так где же Ваше решение? Где Ваши координаты? Их нет. Их никто не видел.
> У Вас очень грубое решение
Что же в нем грубого, если имеется такое хорошее совпадение?
> , при котором можно фальсифицировать любой результат современных снимков с орбиты Луны под аполлоновские.
Нельзя любой. Можно лишь тот, что не отличается от имеющихся снимков LROC больше, чем на единицы % по расстояниям.
> Положение камер уточнил.
Ну вот и приведите список координат.
> Вениамин, у вас отклонение от нулевой погрешности на порядок выше!
Еще недавно было "в тысячи раз" (т. е. на 3 порядка), а сейчас уже только на порядок... Вы хоть сами с собой можете договориться?
> В целом, Вениамин можно сравнивать ваши положения объектов с фактическими углами официальных снимков и реальными координатами, чтобы с точки зрения МАТЕМАТИКИ ПИФАГОРА утверждать о Вашей мистификации!
"Математика Пифагора" подтверждает мое решение. А Вашего решения никто еще не видел.
Значит, Олег, так: ВАШЕГО РЕШЕНИЯ НЕТ. ЕГО НИКТО НЕ ВИДЕЛ. Чтобы что-то можно было говорить о Вашем решении предметно, ВЫ ДОЛЖНЫ ЕГО ПОКАЗАТЬ. Дать список координат. СПИСОК КООРДИНАТ, ПОНИМАЕТЕ? Я в сообщении 44 сказал, что от Вас требуется. Список координат. Дайте список координат камер, валунов, опор. По 3 координаты для каждого объекта.
Ждем-с.
Попугай Кеша (часть 1)
По поводу угла 10=370 градусов, что очевидно, уже написал - не будьте попугаем Кешей и разберитесь, что есть ошибка с точки зрения моделирования и точности модели!
Список координат вида (X, Y, Z) для валунов, камер и центров посадочных опор дам екселем. Жду от Вас тех же данных.
По поводу отрицания среднего отклонения от нулевой ошибки Вы глупите, как с отрицанием применения теоремы Пифагора для фотограмметрии. Разберитесь! Это обычный статистический термин, который показывает какая же точность выбранной модели. Очевидно, отклонение в идеале должно стремиться к нулю или точности измерения фактических данных. В нашем случае со снимками Аполлон-11 отклонение должно быть ниже 1%.
Как писал выше, систему уравнений уточняю, делая новые прогоны поиска решения и включая новые реперные точки, например, не удобный для Вас дальний валун у Западного кратера W. Ранее мной были даны координаты (X, Y, Z) валунов t1-t4 для ваших положений камер в Экселе (100-131 м, погрешность 0,91%, отклонение 0,37) - сообщение 40. Очевидно, это есть итог решения системы уравнений. Сейчас, положение камер уточнено по фактическим данным. В то время как Вы никаких уравнений не решали, вместо этого использовали не протестированную ком. программу превращения изображения фотоснимка в трехмерную картинку на дисплее. У Вас подход тот же, что продемонстрировал Юрий Красильников (официальный сотрудник и защитник НАСА) в программе для сборки панорам Hugin стереопар, когда дальние объекты были сведены не оптическими преобразованиями. Данным автором не была указана сетка преобразований. В то время как сетка преобразований для удаленного ландшафта для любых снимков Аполлонов имеет универсальный характер - криволинейную поверхность, что указывает или соответствует обратной проекции на плоскость киноэкрана круговой панорамы.
Мое решение уравнений показывает: все валуны t1-t4, w находятся в пределах 100-150 метров. Точность решения уравнений вблизи ЛМ имеет среднее отклонение от нулевой ошибки 0,007%, для дальних объектов t1-t4 и w - около 1%. Дальние объекты можно сместить не более чем на 5 метров в одну или другую сторону. Большее смещение приводит к увеличению угловых отклонений по данной модели от фактических данных. По LROS данные объекты находятся от ЛМ в 110-500 м. СОВПАДЕНИЯ даже приблизительного нет! Более точное решение для удаленного ландшафта можно провести, если варьировать положение камер. В итоге получаем, что мы имеем для ближнего и дальнего ландшафта разное положение одних и тех же камер. Это и есть фотограмметрический излом. Последний указывает на искусственность переднего или заднего ландшафта. Ясно, что мистифицируют задний ландшафт. Примерно так, как в старые добрые времена на киностудии Госмосфильма с помощью киноэкрана создается удаленная сцена. Отличие в том, что киностудией Госмосфильма есть НАСА и её художники сюра. "
}
Давно просил данные Вашей карты Х, Y и Z для опор, камер, SWC и валунов одним сообщением, смотри, например, сообщение 19, чтобы можно было проверить не частями, а в целом всю картину! Высота 33 см для опоры "-Y" - это очень много. Какой у Вас наклон ЛМ?
По поводу "ОТНОСИТЕЛЬНУЮ ОШИБКУ АБСОЛЮТНОГО УГЛА ОПРЕДЕЛЯТЬ НЕЛЬЗЯ!", если я пропускаю данное мимо, значит это длинная дискуссия, выходящая за пределы главной темы или оффтоп. Разберитесь, что считается ошибкой с точки зрения расчетов, точности модели и не делайте себя попугаем Кешей.
Попугай Кеша (часть 1)
По поводу угла 10=370 градусов, что очевидно, уже написал - не будьте попугаем Кешей и разберитесь, что есть ошибка с точки зрения моделирования и точности модели!
Список координат вида (X, Y, Z) для валунов, камер и центров посадочных опор дам екселем. Жду от Вас тех же данных.
По поводу отрицания среднего отклонения от нулевой ошибки Вы глупите, как с отрицанием применения теоремы Пифагора для фотограмметрии. Разберитесь! Это обычный статистический термин, который показывает какая же точность выбранной модели. Очевидно, отклонение в идеале должно стремиться к нулю или точности измерения фактических данных. В нашем случае со снимками Аполлон-11 отклонение должно быть ниже 1%.
Как писал выше, систему уравнений уточняю, делая новые прогоны поиска решения и включая новые реперные точки, например, не удобный для Вас дальний валун у Западного кратера W. Ранее мной были даны координаты (X, Y, Z) валунов t1-t4 для ваших положений камер в Экселе (100-131 м, погрешность 0,91%, отклонение 0,37) - сообщение 40. Очевидно, это есть итог решения системы уравнений. Сейчас, положение камер уточнено по фактическим данным. В то время как Вы никаких уравнений не решали, вместо этого использовали не протестированную ком. программу превращения изображения фотоснимка в трехмерную картинку на дисплее. У Вас подход тот же, что продемонстрировал Юрий Красильников (официальный сотрудник и защитник НАСА) в программе для сборки панорам Hugin стереопар, когда дальние объекты были сведены не оптическими преобразованиями. Данным автором не была указана сетка преобразований. В то время как сетка преобразований для удаленного ландшафта для любых снимков Аполлонов имеет универсальный характер - криволинейную поверхность, что указывает или соответствует обратной проекции на плоскость киноэкрана круговой панорамы.
Мое решение уравнений показывает: все валуны t1-t4, w находятся в пределах 100-150 метров. Точность решения уравнений вблизи ЛМ имеет среднее отклонение от нулевой ошибки 0,007%, для дальних объектов t1-t4 и w - около 1%. Дальние объекты можно сместить не более чем на 5 метров в одну или другую сторону. Большее смещение приводит к увеличению угловых отклонений по данной модели от фактических данных. По LROS данные объекты находятся от ЛМ в 110-500 м. СОВПАДЕНИЯ даже приблизительного нет! Более точное решение для удаленного ландшафта можно провести, если варьировать положение камер. В итоге получаем, что мы имеем для ближнего и дальнего ландшафта разное положение одних и тех же камер. Это и есть фотограмметрический излом. Последний указывает на искусственность переднего или заднего ландшафта. Ясно, что мистифицируют задний ландшафт. Примерно так, как в старые добрые времена на киностудии Госмосфильма с помощью киноэкрана создается удаленная сцена. Отличие в том, что киностудией Госмосфильма есть НАСА и её художники сюра.
> Давно просил дать данные Вашей карты Х, Y и Z для опор, камер, SWC и валунов одним сообщением, смотри, например, сообщение 19, чтобы можно было проверить не частями, а в целом всю картину!
Ну я же говорю Вам: у меня определены координаты нескольких сотен объектов и 116 камер, каждый объект имеет лишь цифровое обозначение. Для меня чисто технически потребует некоторого труда составить таблицу для всех этих объектов так, чтобы их можно было опознать на снимках. Но главное то, что пока статья не опубликована, а значит, я не могу сейчас публиковать значительные объемы цифровых данных из нее. После публикации я смогу это сделать.
А сейчас я могу - и делаю это - сообщать тройки координат для отдельных объектов, которые Вы попросите. И я это делаю. Я Вам давал все конкретные координаты всех конкретных объектов, которые Вы меня просили. И камер, и артефактов, и валунов.
> По поводу "ОТНОСИТЕЛЬНУЮ ОШИБКУ АБСОЛЮТНОГО УГЛА ОПРЕДЕЛЯТЬ НЕЛЬЗЯ!", если я пропускаю данное мимо, значит это длинная дискуссия, выходящая за пределы главной темы - оффтоп, разберитесь, что считается ошибкой с точки зрения расчетов, точности модели
Мне-то разбираться нечего, это совершенно элементарная вещь, которую Вы почему-то до сих пор не можете понять. Давайте я еще раз Вам объясню.
Допустим, Вы измеряете углы между парами объектов. 3 угла измеряете. Один равен 0 градусов, другой 90 градусов, третий 180 градусов. Пусть абсолютная погрешность во всех случаях одинаковая, 5 градусов. В этом случае ТОЛЬКО АБСОЛЮТНАЯ ПОГРЕШНОСТЬ имеет смысл. Попытки вычислить "от/носительную ошибку" БЕССМЫСЛЕННЫ. Угол между двумя объектами (абсолютный угол), равный 0 градусов, ничем не лучше и не хуже угла в 90 градусов или угла 180 градусов. Поэтому БЕССМЫСЛЕННО заявлять, что для угла 90 градусов "относительная ошибка" (=5/90) якобы вдвое больше, чем для угла 180 градусов (=5/180). Более того, угол 90 градусов тождественен углу 270 градусов, если его измерять в другую сторону, поэтому с тем же успехом можно объявить "относительную ошибку" этого угла равной 5/270. Или угла в 450 градусов.
Вы просто путаете абсолютное измерение и относительное. Если бы у Вас вращался какой-то объект, то можно было бы определять относительную погрешность, деля абсолютную погрешность на УГОЛ ПОВОРОТА. Но и тогда Вы должны были бы делить именно на УГОЛ ПОВОРОТА (= начальный угол - конечный угол), а не на АБСОЛЮТНОЕ ЗНАЧЕНИЕ конечного угла.
> Список координат вида (X, Y, Z) для валунов, камер и центров посадочных опор дам екселем. Жду от Вас тех же данных.
Вот и давайте. Я могу дать такой же список одной кучкой (хотя уже давал все координаты, но могу повторить). У меня сейчас комп с данными в ремонте, но если очень нужно, скажите, я могу отыскать все цифры на бэкапных дисках. Только скажите.
> По поводу угла 10=370 градусов, что очевидно, уже написал - не будьте попугаем Кешей и разберитесь, что есть ошибка с точки зрения моделирования и точности модели! ... > По поводу отрицания отклонения от среднего ошибки Вы глупите, как с отрицанием применения теоремы Пифагора для фотограмметрии.
Во-первых, никто не отрицал теорему Пифагора, Вы что-то опять фантазируете. Во-вторых, я Вам насчет Вашей "относительной ошибки" уже так подробно объяснил, что дальше некуда. Если Вам что-то непонятно в моих объяснениях, скажите, что непонятно-то? Уже в детском саду бы поняли, я думаю. > Как писал выше, систему уравнений уточняю, делая новые прогоны поиска решения и включая новые реперные точки
Когда будет готовое решение, давайте координаты камер, опор и валунов, которые я назвал. Нет координат - нет решения. Сейчас Вашего решения НЕТ.
> например, не удобный для Вас дальний валун у Западного кратера W.
Он для меня очень удобен. Это один из самых дальних отождествленных валунов. Обязательно в будущем включу его в карту.
> Ранее мной были даны координаты (X, Y, Z) валунов t1-t4 для ваших положений камер в Экселе (100-131 м, погрешность 0,91%, отклонение 0,37) - сообщение 40. Очевидно, это есть итог решения системы уравнений. Сейчас, положение камер уточнено по фактическим данным.
Пока нет координат камер, от этих координат валунов нет никакой пользы. Их невозможно проверить без координат камер. Только с координатами камер будет возможна проверка.
НЕТ КООРДИНАТ КАМЕР И ВАЛУНОВ - НЕТ РЕШЕНИЯ.
> В то время как Вы никаких уравнений не решали, вместо этого использовали не протестированную ком. программу превращения изображения фотоснимка в трехмерную картинку на дисплее.
Как же не протестированную? Очень даже протестированную. Более того, мы с Вами вместе здесь ее многократно протестировали и убедились, что решение, даваемое программой, прекрасно соответствует положениям реперов на снимках.
И Вы опять что-то путаете: программа не превращает фотоснимки в трехмерную картинку. Она дает трехмерное РЕШЕНИЕ - наборы трехмерных координат.
> У Вас подход тот же, что продемонстрировал Юрий Красильников (официальный сотрудник и защитник НАСА) в программе для сборки панорам Hugin стереопар, когда дальние объекты были сведены не оптическими преобразованиями.
Я не специалист по Hugin, но Hugin, если я чего не путаю, делает именно преобразования, соответствующие проекциям геометрической оптики.
> Данным автором не была указана сетка преобразований. В то время как сетка преобразований для удаленного ландшафта для любых снимков Аполлонов имеет универсальный характер - криволинейную поверхность, что указывает или соответствует обратной проекции на плоскость киноэкрана круговой панорамы.
"Сетка преобразований" - это галиматья, бредовая фантазийная конструкция, существующая только в Вашем воображении. Никакой "сетки преобразований" в реальности не существует вовсе. Посмотрите Гугл, http://www.google.ee/#hl= ru&source=hp&q=%22%D1%81%D0%B5%D1%82%D0%BA%D0%B0+%D0%BF%D1%80%D0%B5%D0%BE%D0%B1%D1%80%D0%B0%D0 %B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B9%22&oq=%22%D1%81%D0%B5%D1%82%D0%BA%D0%B0+ %D0%BF%D1%80%D0%B5%D0%BE%D0%B1%D1%80%D0%B0%D 0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B9%22&aq=f&aqi=&aql=1&gs_sm=e&gs_upl= 809l4802l0l5108l22l22l0l21l0l0l47l47l1l1&bav=on.2,or.r_gc.r_pw.&fp =3797bcff6ce7f339&biw=1366&bih=624 - термин "сетка преобразований" выдуман Вами и встречается только в Ваших фантазийных построениях. Науке эта вещь не известна.
Повторяю: Вашего решения НЕТ. Его никто не видел. Решение - это набор координат валунов и камер, которые можно было бы проверить. Пока нет координат - ничего невозможно проверить, и Ваши заявления про якобы "Ваше решение" остаются бездоказательной болтовней.
> все валуны t1-t4, w находятся в пределах 100-150 метров.
Да неужели? А вот раньше, не далее как в апреле ( http://ligaspace.my1.ru/news/2011-04-10-301 ), Вы говорили нечто совершенно другое:
> "Мы получаем, что расстояние от "астронавтов" до валунов 75-90 метров"
Получается, что теперь Ваше решение (которого никто не видел) изменилось аж в полтора раза, и все валуны "отодвинулись" почти туда, где они и находятся на снимках ЛРО (и где они находятся на самом деле на снимках А-11). Ведь валуны t2-t4 действительно находятся именно на таком расстоянии, и только валун tt находится чуть дальше. Ну и валун w, конечно. С ним Вы промахнулись особенно сильно, и это будет очень легко показать, когда Вы дадите координаты камер.
Может, пройдет еще три месяца, и Ваши положения валунов окончательно совпадут с положениями на снимках ЛРО? Большую часть пути валуны у Вас уже проделали. :)
> Точность решения уравнений вблизи ЛМ имеет среднее отклонение от нулевой ошибки 0,007%, для дальних объектов t1-t4 и w - около 1%.
Нет никакого у Вас решения. Будут координаты - будет решение.
> По LROS данные объекты находятся от ЛМ в 110-500 м. СОВПАДЕНИЯ даже приблизительного нет!
Совпадение по t2-t4 у Вас уже примерно 10 %, если судить по Вашей карте, по t1 -
> Более точное решение для удаленного ландшафта можно провести, если варьировать положение камер.
Проведите, варьируйте. Действуйте. Когда решение у Вас, наконец, появится, не забудьте сообщить. :)
> В итоге получаем, что мы имеем для ближнего и дальнего ландшафта разное положение одних и тех же камер. Это и есть фотограмметрический излом.
В итоге пока мы получаем то, ЧТО ПОКАЗАЛ ВАМ Я: у меня единственный набор камер, и он отлично соответствует и положению ближних, и дальних объектов. И ни одной ошибки или несоответствия Вы найти в моих координатах не смогли, как ни старались.





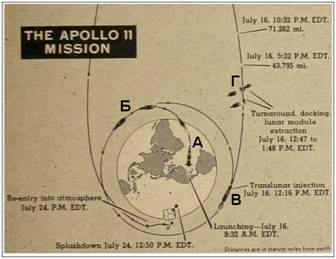






 Одним из грандиозных событий 20-го столетия была высадка человека на поверхность нашего спутника Луна. Согласно НАСА шесть миссий Аполлон посещали поверхность Луны и возвращались на Землю (1969-1972 гг.). Однако, уже через год после Аполлон-11 появились первые журналистские статьи и выходит книга математика Дж. Крайни, в которых факт высадки ставился под сомнение и приводились аргументы о фальсификации НАСА.
Одним из грандиозных событий 20-го столетия была высадка человека на поверхность нашего спутника Луна. Согласно НАСА шесть миссий Аполлон посещали поверхность Луны и возвращались на Землю (1969-1972 гг.). Однако, уже через год после Аполлон-11 появились первые журналистские статьи и выходит книга математика Дж. Крайни, в которых факт высадки ставился под сомнение и приводились аргументы о фальсификации НАСА. 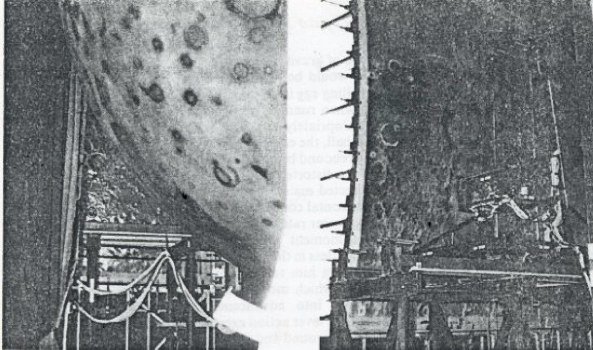




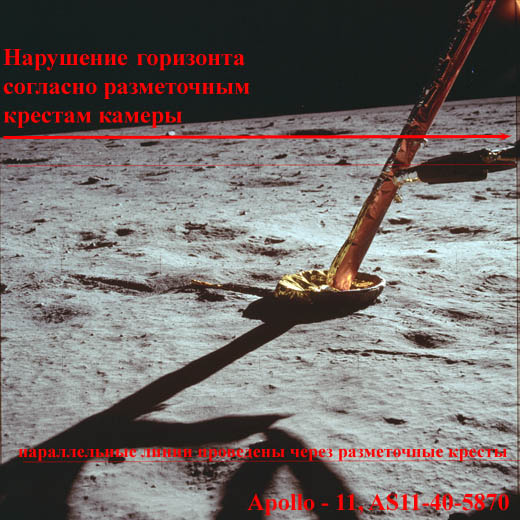
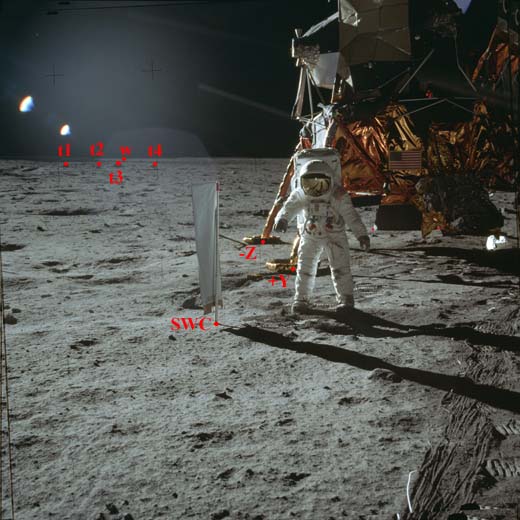

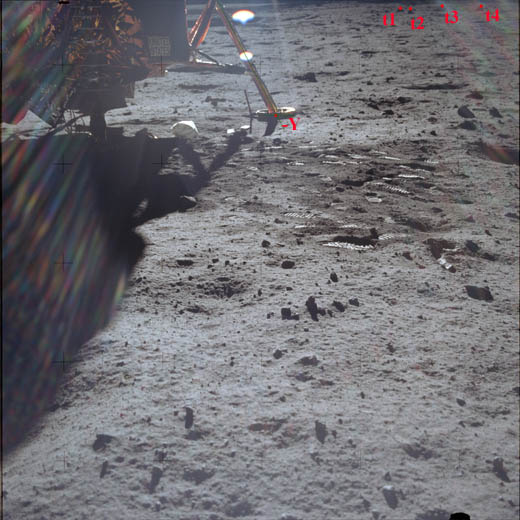
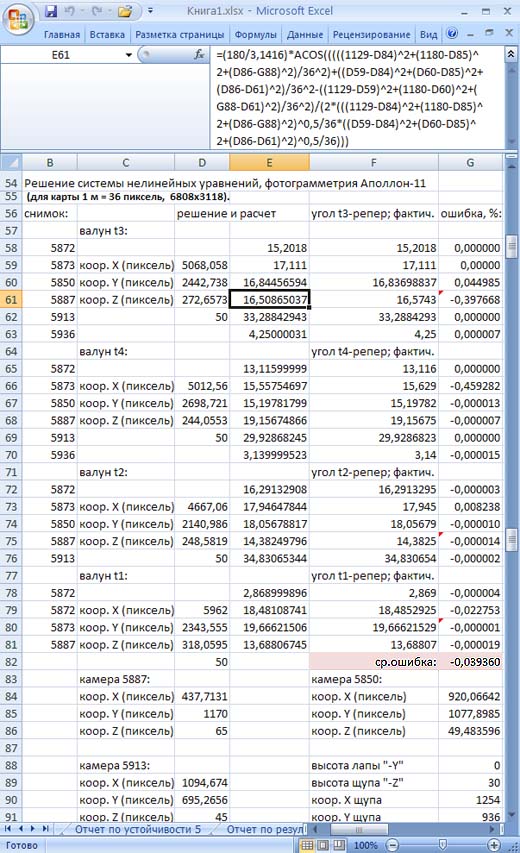
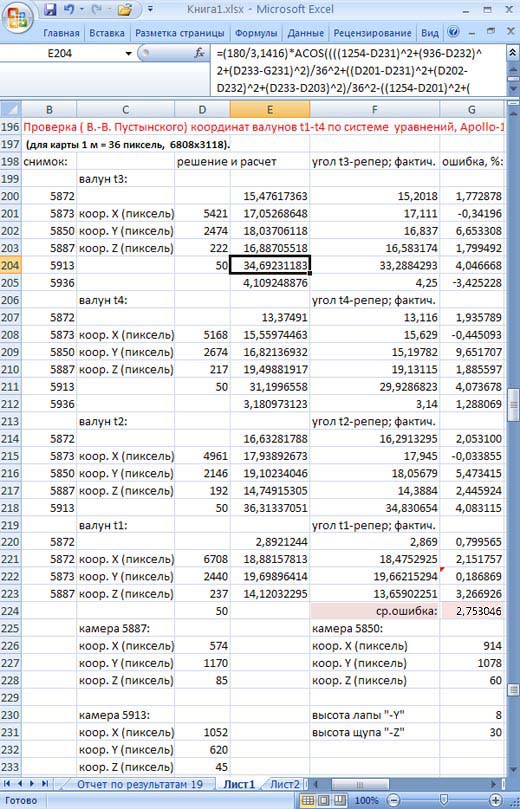
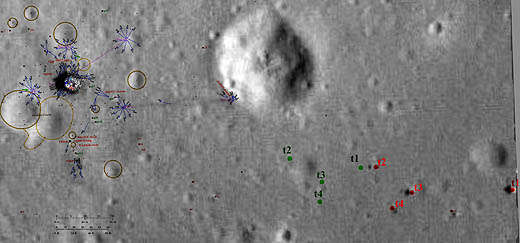
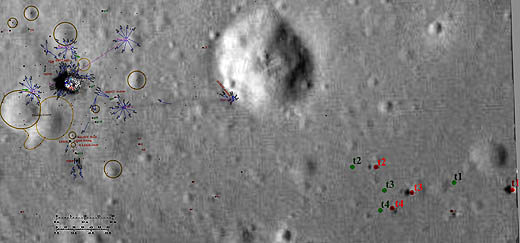
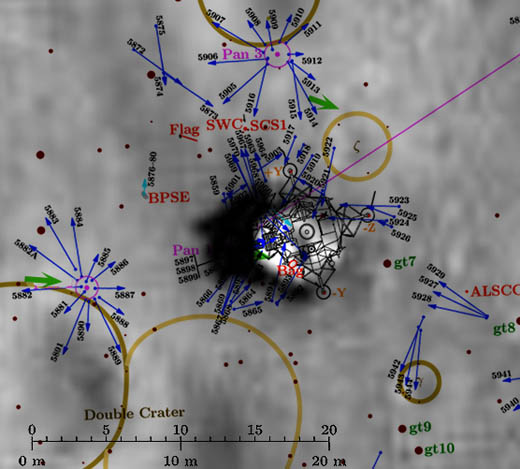
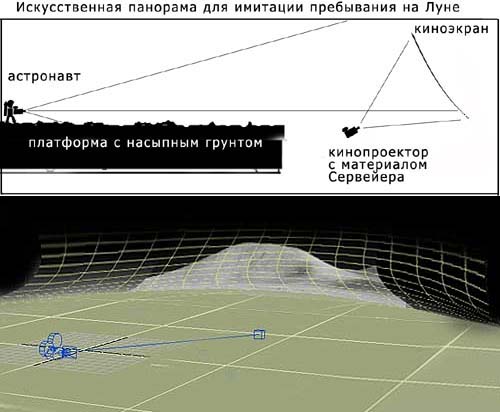
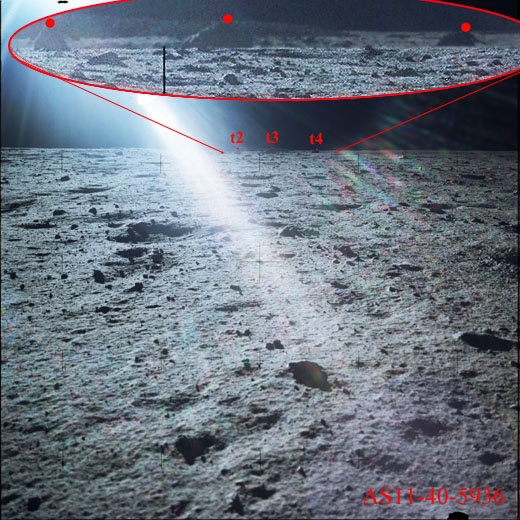
 "
}
"
}

