Главная » 2011»Апрель»10 » Аполлон 11. Имитация удаленного ландшафта Луны. Стереоскопический метод проверки материалов LRO
Аполлон 11. Имитация удаленного ландшафта Луны. Стереоскопический метод проверки материалов LRO
16:04
Аполлон-11 (Apollo 11) - пилотируемый космический корабль серии «Аполлон», который по легенде НАСА впервые доставил людей на поверхность другого космического тела - Луны. Командир - Нил Армстронг. Пилот командного модуля - Майкл Коллинз. Пилот лунного модуля - Эдвин E. Олдрин младший. Задача полета: посадка на Луну в западной части Моря Спокойствия, сбор образцов лунного грунта, фотографирование на поверхности Луны, установка на Луне научных приборов, проведение телевизионных сеансов с борта корабля и с поверхности Луны. Запуск с Земли состоялся 16 июля, посадка 24 июля 1969 года. Во время пребывания на Луне было выполнено три сотни фотоснимков и около десятка телесюжетов, что было представлено НАСА как доказательство пребывания человека на Луне.
Видео. Высадка Нила Амстронга на поверхность Луны
В Москве после этого отказались от планов высадить на Луне
наших космонавтов. А ведь их готовили.
Сомневающиеся в высадке человека на Луне появились в 1969 году. В 1970 г. вышла книга математика Дж. Крайни, в которой он поставил высадки под сомнение. В 1976 в другой книге Билл Кейсинг сформулировал основные аргументы теории лунного заговора:
Уровень технологического развития НАСА не позволял отправить человека на Луну.
Отсутствие звёзд на фотографиях с поверхности Луны.
Снимки при атмосферных условиях с окна лунного модуля и с поверхности Луны идентичные.
Различные оптические аномалии на фотографиях.
Колыхания флага в вакууме.
Отсутствие лунки выноса реголита под лунным модулем, которая должна была образоваться в результате посадки ЛМ от реактивной струи двигателей.
Сторонники теории «лунного заговора» утверждают, что на фотографиях и в кинофильмах о посадках на Луну есть противоречия, что осуществление таких полётов в те годы было «технически невозможным», образцы пород легко фальсифицировать. Теория заявляет, что США пошли на фальсификацию по соображениям поднятия своего политического престижа из-за отставания от СССР в космических достижениях в начале 1960-х годов. Прошло более 40 лет. Полет человека к Луне откладывается из-за недостаточного технического развития космической техники до 2030 года. Дискуссия вокруг "лунного заговора" продолжается до сих пор!
Лунный орбитальный зонд (Lunar Reconnaissance Orbiter, LRO) - автоматическая межпланетная станция NASA, искусственный спутник Луны. Запуск состоялся 19 июня 2009 года и работает по настоящее время. Одной из задач LRO было фотографирование мест посадок Аполлонов. 17 июля 2009 г., перед 40-летним юбилеем НАСА первой посадки на Луну, были опубликованы сделанные Orbiterом фотографии Аполлон-11.
Ниже
мы рассмотрим одно из противоречий материалов лунной программы Аполлон-11 на
стереоскопический эффект снимков. Впервые статья по этому материалу
появилась в январе 2008 гг.. Суть заключается в том, что если для
одиночного снимка невозможно
указать расстояние до объектов снимка, чем можно воспользоваться для
фальсификации, то для двух снимков разнесенных
на расстоянии того же ландшафта определяется стереоскопический
параллакса, расстояние до объектов и сетка искажений. По расстоянию до удаленных объектов и сетке искажений можно строго говорить: перед
нами фальсификация или нет!
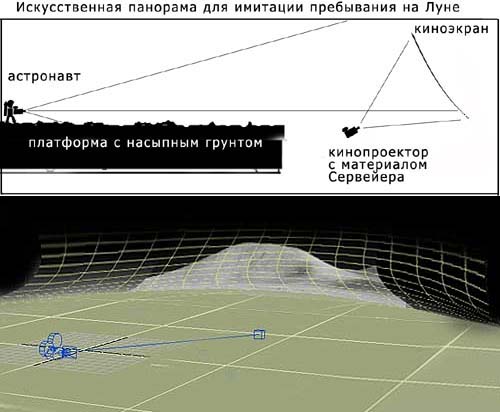
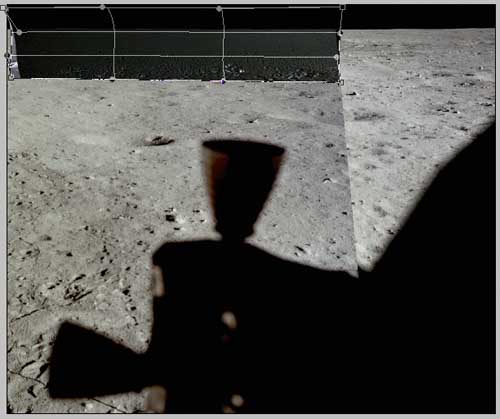
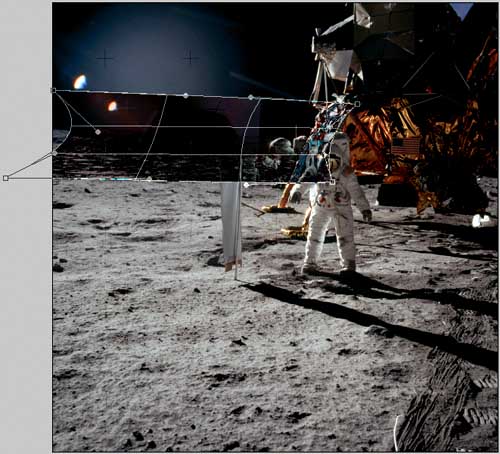
Илл. 1. Логика и простота симуляции лунной панорамы миссии Аполлонов. Используется платформа с насыпным грунтом и киноэкран для имитации удаленного ландшафта. Криволинейной сеткой
показан киноэкран, который опоясывает место симуляции миссии Аполлонов.
Для Аполлон-15 было показано, что графическим сведением кадров мы решаем
систему уравнений из более чем миллиона уравнений (количество пикселей
снимков) в рамках законов оптики! Однако, чтобы свести удаленный
ландшафт к нулевому стереоскопическому эффекту, мы выходим за рамки оптических преобразований и используем сетку искажений.
Различные материалы Аполлон 15 указывают на идентичность сетки искажения - наличие киноэкрана в 100-120 метрах. Перед
нами фальсификация лунного ландшафта, в частности,
искусственный ров шириной 30-60
метров выдается за лунный разлома Rima Hadley с шириной 1200
метров, "удаленный ландшафт" проектируется на киноэкран, на его фоне снимаются "астронавты". В данной статье мы рассматриваем универсальный характер сетки искажения удаленного ландшафта для Аполлон-11. Кроме этого, мы рассмотрим снимки с орбиты (LRO) и с поверхности Луны (Аполлон-11) на идентичность пространственного положения крупных валунов и кратеров лунного ландшафта.
АПОЛЛОН 11
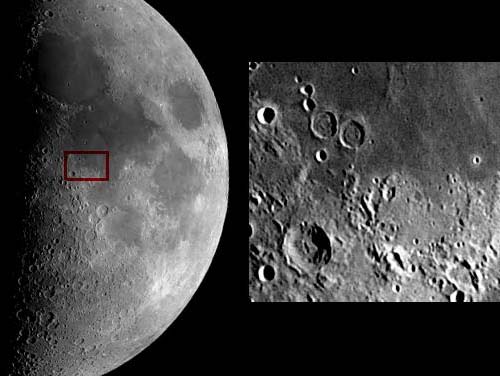
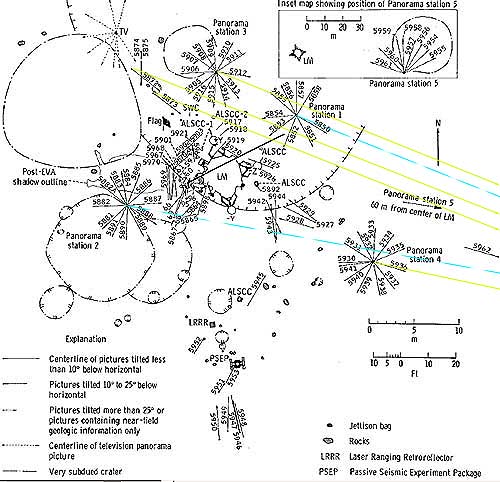
Илл. 2. Место посадки Аполлон-11.
Илл. 3. Подробная карта места посадки Аполлон-11.
ЗАПАДНОЕ НАПРАВЛЕНИЕ ОТ ЛУННОГО МОДУЛЯ Аполлон-11.
Рассмотрим вид с левого и правого окна лунного модуля - снимки AS11-37-5451HR и AS11-37-5490HR. Высота над лунной поверхностью около 4 метров. Лунный горизонт просматривается на несколько километров. Смещение камеры в руках Э. Олдрина составляет не более одного метра. Это позволяет составить стереопару из двух снимков.
Илл. 4. Стерепара на основе AS11-37-5451HR и AS11-37-5490HR. Показан параллакс,
который получается после сложения двух кадров. Для получения данной
стерепары использовались оптические преобразования: компьютерного масштабирования,
поворота, обратной дисторсии, перспективы, сдвига и сведение кадров в
один стереокадр.
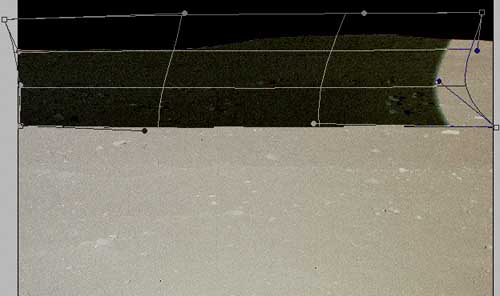
Удаленный ландшафт на один и более километров не сводится к нулевому значению. Для сведения удаленного ландшафта к нулевому стереоскопическому эффекту мы выходим за рамки оптических преобразований и накладываем сетку искажений. Получаем сетку искажения, при которой сводится удаленный ландшафт. Сетка искажений удаленного ландшафта для данных снимков та же, что для Аполлон 15.
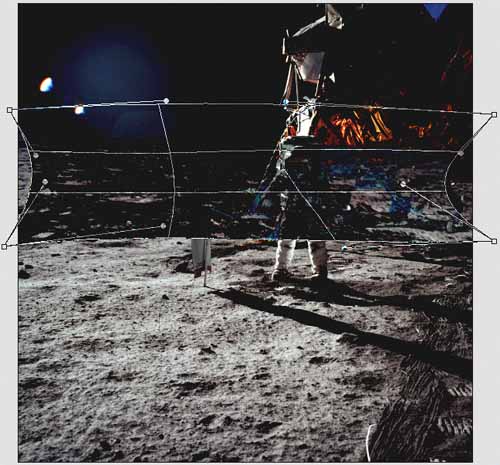
Илл. 5. Сетка искажений удаленного ландшафта для сведения снимков AS11-37-5451HR и AS11-37-5490HR.
Очевидно, что выход за оптические преобразования и наличие сетки искажения является показателем
симуляции лунного ландшафта. С учетом сетки искажений получаем следующую
стеопару
Илл. 6. Стереопара AS11-37-5451HR и AS11-37-5490HR после оптических
преобразований и наложения сетки искажения на удаленный ландшафт.
Расстояние до киноэкрана по стереоскопическому параллаксу 70 метров
(относительная погрешность не более 60%).
Полученная стереопара указывает на расстояние до киноэкрана 70 метров
(относительная погрешность не более 60%), на который проектируется удаленный ландшафт.
СЕВЕРНОЕ НАПРАВЛЕНИЕ ОТ ЛУННОГО МОДУЛЯ Аполлон-11. Рассмотрим вид с правого окна лунного модуля - снимки AS11-37-5468HR и AS11-37-5469HR. Высота над лунной поверхностью около 4 метров. Лунный горизонт
просматривается на несколько километров. Смещение камеры в руках Э. Олдрина составляет не более 20 см. Это позволяет составить стереопару из двух снимков. После оптических преобразований получаем стереопару:
Илл. 7. Стерепара на основе AS11-37-5468HR и AS11-37-5469HR. Показан параллакс,
который получается после сложения двух кадров. Для получения данной
стерепары использовались оптические преобразования смещения по Х и У, поворот.
Теперь перейдем к сетке искажения удаленного ландшафта, когда удаленный ландшафт сводится к нулевому стереоскопическому эффекту:
Илл. 8. Сетка искажений удаленного ландшафта для сведения снимков AS11-37-5468HR и AS11-37-5469HR.
Мы получаем ту же сетку искажения для удаленного ландшафта, что показано выше. Это указывает на универсальный характер имитации удаленного ландшафта.
ВОСТОЧНОЕ НАПРАВЛЕНИЕ ОТ ЛУННОГО МОДУЛЯ АПОЛЛОН-11 Рассмотрим дальний горизонт в юго-восточном направлении от лунного модуля Аполлон-11
Илл. 9. Снимки с орбиты лунным орбитальным зондом (2009 г.) места посадкиApollo 11 lunar module, Eagle. LRO - Larger image
Материалы А 11 для указанного направления предоставляют нам следующие
снимки: AS11-40-5872HR, AS11-40-5873HR, AS11-40-5887HR, AS11-40-5888HR,
AS11-40-5913HR, AS11-40-5936HR. Данная съемка ведется с лунной поверхности с груди Нила Армстронга и Э. Олдрина, поэтому до линии горизонта Луны не более двух километров.
Илл. 10. Исследование дальнего горизонта на Восток-Юг от лунного модуля по карте съёмки Аполлон 11
Илл. 11. Стереопара на основе снимков AS11-40-5872HR и AS11-40-5873HR.
Преобразование - только поворот. Стереобаза 1 метр, расстояние между
местами съемки 3 м.
Илл. 12. Стереопара на основе снимков AS11-40-5872HR и AS11-40-5913HR.
Преобразование - поворот. Стереобаза - 3 метров, расстояние между
местами съемки 7 метров
Илл. 13. Стереопара на основе снимков AS11-40-5872HR и AS11-40-5936HR.
Преобразования только поворот. Стереобаза - 6 метров, расстояние между
местами съемки 35 метров
Теперь перейдем к постройке сетки искажения удаленного ландшафта, когда стереоскопический эффект равен нулю:
Илл. 14. Сетка искажений удаленного ландшафта для сведения снимков
AS11-40-5872HR и AS11-40-5873HR. Стереобаза 1 метр, расстояние между
местами съемки 3 м.
Илл. 15. Сетка искажений удаленного ландшафта для сведения снимков
AS11-40-5872HR и AS11-40-5913HR. Стереобаза - 3 метров, расстояние между
местами съемки 7 метров.
Мы получаем ту же сетку искажения, что для Аполлон 15, и что для снимков Аполлон-11 в западном и северном направлении от ЛМ. Сетка искажений показывает, что удаленный ландшафт от "астронавтов" на расстояние 80 и более метров имитируется на киноэкран.
СРАВНЕНИЕ ЛУННОГО ЛАНДШАФТА В МЕСТЕ ПОСАДКИ АПОЛЛОН-11 С ОРБИТЫ LRO И C ПОВЕРХНОСТИ ЛУНЫ
Материалы Аполлон-11 позволяют рассматривать стереопару при большем
разрешении и определить расстояние до объектов лунного ландшафта - стереопара на основе снимков AS11-40-5872HR и
AS11-40-5936HR. Стереобаза составляет 6 метров, расстояние между местами съемки
35 метров.
Илл. 16. Стереопара на основе снимков AS11-40-5872HR и AS11-40-5936HR.
Преобразования только поворот. Стереобаза - 6 метров, расстояние между
местами съемки 35 метров.
Формула для расчета расстояния по фотоматериалам при приближении (удалении) к объекту съемки:
X = L / |M-1|,
где L - расстояние между местами съемки, M - относительное увеличение
размера предмета при приближении к нему. Полезно учесть погрешность, в
которую входит отклонение от прямой линии фотосъемки, точность
определения размера объекта, дисторсия.
Относительное увеличение
размеров валунов t2-t4 слева направо: 1,57; 1,45 и 1,56. Мы получаем, что
расстояние от "астронавтов" до валунов 75-90 метров, относительная погрешность до
60%. В то время как снимки с LRO указывают, что расстояние до этих валунов много больше 100 метров. Взаимное положение высоких валунов, как и других (всего t0-t4)
в юго-восточном направлении от лунного модуля в фотоматериалах Аполлон-11 не
соответствует их положению по материалам LRO.
Илл. 17. Взаимное положение высоких валунов t0-t4 в юго-восточном направлении от лунного модуля в фотоматериалах Аполлон-11 не
соответствует их положению по материалам LRO.
Можно предложить фотограмметрическую методику проверки фотоматериалов LRO мест посадок Аполлонов. Методика заключается на том характере, что если взаимное положение кратеров, разломов и камней на платформе с насыпным грунтом сохраняется, то на киноэкране нет. Это значит, что взаимное положение элементов (или углы между положениями объектов относительно астронавтов), как крупные камни и мелкие кратеры на снимках LRO отличаются от их положения на снимках Аполлонов начиная с расстояния 70-100 метров и более.
Например, по материалам Аполлон-11 на расстоянии 30 метров находятся три кратера, до дальнего валуна около 90 метров.
Илл. 18. Несоответствие снимков Аполлон 11 и LRO
Размеры кратеров слева направо: 2, 5 и 4 метров, расстояние между
кратерами около метра. Составлено на основе AS11-37-5458HR и
AS11-37-5490HR. По данным LRO - это практически цельный тройной кратер,
размером 11-9 метров. Получили НЕСООТВЕТСТВИЕ!
Другой пример. Данным холмам на снимках Аполлон-11 нет адекватных объектов на снимках LRO (2009 г.) на расстоянии от 1 до 5 км.
Илл. 19. В кандидаты на место двух возвышенностей могли бы подойти два
кратера 300 и 200 м (один с меньшим кратером внутри), однако их угловой
размер в несколько раз превышает угловые размеры возвышенностей на
снимках Аполлон-11. Расстояние от лунного модуля до выделенного двойного камня-зуба 75-90
метров.
ЗАКЛЮЧЕНИЕ Удаленный ландшафт фотоматериалов Аполлон-11 не возможно свести в рамках оптических преобразований: компьютерное масштабирование,
поворот, обратная дисторсия, перспектива, сдвиг. При сведении удаленного
ландшафта к нулевому стереоскопическому эффекту мы выходим за эти рамки и
получаем характерную сетку искажений вокруг места съемки.
Различные материалы Аполлон-11 указывают на идентичность сетки искажения, характер сетки такой же как для фотоматериалов Аполлон-15. Это указывает на универсальную фальсификацию лунного ландшафта, когда удаленные объекты проектируется на киноэкран, на его фоне снимаются "астронавты". Предложен фотограмметрический метод проверки соответствия фотоматериалов Аполлон и LRO (снимки мест посадок Аполлонов). Анализ азимутального положения и угловых размеров объектов по материалам Аполлон-11 и LRO имеют несоответствия.
Автор: Олейник О. Г.
Далее будет - проверка
универсального характера имитации удаленного лунного ландшафта (киноэкран) по фотоматериалам Аполлон-17, а так же проведение анализа углового положения объектов по материалам Аполлон-17 и LRO.
Измените "колебание" на "колыхание" - это разные вещи, во-первых, а во-вторых, мы видим п оф.видео именно колыхание флага, как на реальном ветру (даже тогда, когда к нему не притрагиваются). А вот защитники НАСА стараются убедить в том, что это одно и тоже: колебаться и колыхаться - например, колебания они наглядно демонстрируют в псевдо опровержении "разрушителей легенд"
Если посмотреть на текст внимательнее, то окажется, что максимальная ошибка не более 4 %, а обычно лучше 2 %, что сопоставимо с точностью преобразования снимка LRO в карту:
Boulder t1 This is the largest and most distant of the t-group boulders. Distance ~163 m from the center of LM. Position estimation accuracy ~2%.
Boulder t2 This is the smallest of the group and closest to the LM. Distance ~ 112 m; accuracy better than 2 %.
Boulder t3 The October and December LROC images indicate that t3 is only a bit smaller than t1. Distance ~129 m, accuracy ~2%.
Boulder t4 t4 is about as tall as t2, but has enough width to be visible even in the October 2009 LROC image. Distance ~127 m, accuracy ~4% (the worst in the group).
4-9% остались от старой версии, это черновик. Точность по азимуту около градуса.
Отлично! Займемся камнями t1, t2, t3 и t4. Т.е. расстояния до камней t1, t2, t3 и t4 определяется на основе фотоматериалов LRO, ошибка не более 2-4%. Ок!
Какое расстояние до камней по стереоэффекту фотоматериалов Аполлон-11?!
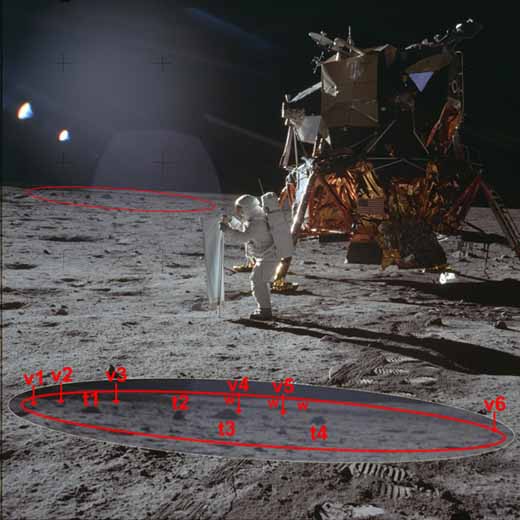
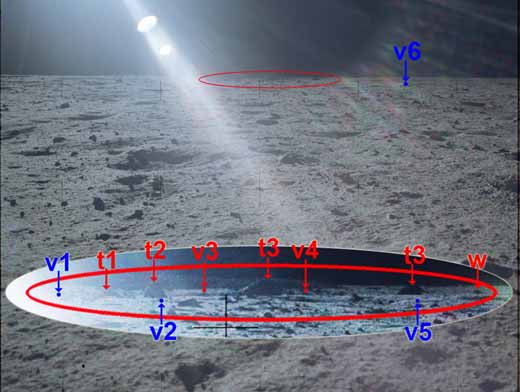
Илл. 1. Фрагмент снимка AS11-40-5872 с пронумерованными валунами в юго-западном направлении у края кратера. Четыре крупных валуна обозначены t1, t2, t3 и t4. Валуны менее видные обозначены группой V группой. Группа пронумерованы слева направо. Сильно затененный край Уэст Кратер проходит с лева валуна t2. Эрозия кратера помечена как "W". Обратите внимание, что валун q1 вне поля зрения. Из статьи "Photogrammetric Analysis Of Apollo 11 Imagery: New camera-station map with improved locations".
Илл. 2. Группы камней t и v на фотоснимке AS11-40-5936. Большая часть t1-t4 валуны и один из валунов w хорошо различаются, они отмечены красными стрелками. Красными точками над вершинами валунов обозначены скрытые валуны, и синими точки обозначены невидимые валуны из-за экранировки местностью или более крупным валуном. Из статьи "Photogrammetric Analysis Of Apollo 11 Imagery: New camera-station map with improved locations".
В статье "Photogrammetric Analysis Of Apollo 11 Imagery: New camera-station map with improved locations" расстояние до камней по данным 1969 года не было определено.
Из-за искажений дисторсия и перспектива на снимках Аполлон-11 ошибка составляет 2-5%. Так же есть ошибка в определении размеров удаленных камней и их теней, она составляет по 2-10% для каждого измерения. Складывая все погрешности получим итоговую ошибку 8-29%. Данными искажениями можно воспользоваться для подгонки результатов. Ошибку можно уменьшить, сделав обратные оптические преобразования для снимков Аполлон-11, а так же используя статистику измерений для разных снимков. Это было сделано авторами в статье? Нет!
Как можно делать заключение, что валуны на снимках Аполлонов и LRO совпадают? Фотограмметрический анализ не был корректно проведен или подогнан!
9Невежество или подгонка значений(19.04.2011 13:59)
0
> Пока же видно невежество или подгонка значений фотограмметрии Vladislav Pustynski and Eric M. Jones В. при работе со снимками Аполллон и LRO!
Но ведь у Image Modeler есть выходной файл с данными, который всегда можно снова открыть в Image Modeler-е и увидеть, как там с подгонкой. Он компилируется, сам выдает координаты, их всегда можно наложить на карту... Как тут можно что-то подогнать? Если "несоответствие много больше 10%", то при подгонке ни один локатор-репер не совпадал бы с объектами на снимках, а на самом деле всё не так, всё хорошо совпадает. :)
На основе изображений LRO для валунов t1-t2 было определено расстояние от ЛМ 165, 120, 135 и 130 метров соответственно. Примем удаленность до валунов таким как указано в статье. Далее читаем, видимые размеры (ширина / высота) валунов 2.3/1.2 м (t1), 0.5/1.0 м (t2), 2.5/1.2 м (t3), и 1.5/1.2 м (t4).
Подсчитаем на основе снимков AS11-40-5872HR, AS11-40-5873HR, AS11-40-5887HR, AS11-40-5888HR, AS11-40-5913HR, AS11-40-5936HR размеры валуна t2. Зная размер снимка в пикселях и угол зрения камеры мы определим угловой размер одного пикселя. Зная размер в пикселях высоты и ширины валуна t2 и расстояние до камня 120 метров, мы определим высоту и ширину валуна в метрах. Так же учтём оптические искажения. Ширина / высота t2 составит 1.0 /1.1 м.
Получили различие для материалов Аполлон-11 и LRO по ширине и высоте камня. По ширине несоответствие - 100%! Кстати, по данным 01 October 2009; Solar El/Az 87.8/195.3; LRO altitude 50 km; разрешение 0.54 m/pixel - валун t2 вовсе не был отмечен.
Откуда авторы Vladislav Pustynski and Eric M. Jones взяли значения ширины / высоты валунов? Или они подгоняли данные Аполлон и LRO под общую картину - фотограмметрическое совпадение?
Размеры получены с большим округлением по действительному расстоянию от камеры 5972 и по положению их в кадре. Цифры остались от черновика и могут быть неточны, т. к. с разных сторон камни выглядят по-разному. Но там прямо сказано, что "However, the stones may be larger than these values because, at least in some cases, the lower parts of the boulders may be hidden by local terrain". Так что проблемы нет.
> В статье "Photogrammetric Analysis Of Apollo 11 Imagery: New camera-station map with improved locations" расстояние до камней по данным 1969 года не было определено.
Ну как же не было, если было?
> Из-за искажений дисторсия и перспектива на снимках Аполлон-11 ошибка составляет 2-5%. Так же есть ошибка в определении размеров удаленных камней и их теней, она составляет по 2-10% для каждого измерения. Складывая все погрешности получим итоговую ошибку 8-29%.
Никаких "искажений дисторсия и перспектива" для фотограмметрических измерений не существует, они учитывают и перспективы (в первую очередь), и дисторсии (которой у данного объектива почти нет). Размер и тени никакого участия в фотограмметрических определениях не принимают. Поэтому ничего не надо складывать и ничего не надо получить. Ошибка определяется сравнением фотограмметрического положения с фотографией, то есть прямым измерением.
> Данными искажениями можно воспользоваться для подгонки результатов.
Никак нельзя, даже в принципе.
> Ошибку можно уменьшить, сделав обратные оптические преобразования для снимков Аполлон-11, а так же используя статистику измерений для разных снимков. Это было сделано авторами в статье? Нет!
Фотограмметрическая программа строит на основании 2-мерных снимков 3-мерную модель, определяя положение объектов и камер на основании перспективных 2-мерных проекций объектов. Погрешности усредняются соответствующим образом по набору фотографий, используемых в расчетах.
> Как можно делать заключение, что валуны на снимках Аполлонов и LRO совпадают?
Потому что они совпадают на фотограмметрической карте и на фотографии LRO с точностью лучше 4 %, а во многих случаях лучше 2 %. Никаких других кандидатов в окрестности 2 % нет, тем более, что в линейной мере (единицы метров) эти величины сопоставимы с размерами самих валунов. Все очень просто.
> Фотограмметрический анализ не был корректно проведен или подогнан!
В чем же состоит некорректность, если он сделан по всем правилам? Все локаторы на всех фотографиях совпадают с реперными объектами, отклонения локаторов малы, никакой подгонки чего-либо вообще не использовано. Просто с помощью камеры найдены координаты объектов и камер, а потом наложены на снимки LRO. Все прекрасно совпадает. Даже дальние объекты на расстоянии сотен метров совпадают с точностью до единиц процентов.
При определении ошибки снимка учитывают погрешность измерения. Она составляет 0,5-1 пиксель в зависимости от метода и требований оценки точности. Для снимков Аполлон размеры валунов 9-25 пикселей или относительная погрешность измерения 4-11%. Для снимков LRO при разрешении 0,5-1 пиксель и размерах валунов 1-5 пикселей, длине тени 2-20 пикселей относительная погрешность составит от 5 до 100%. Наконец, дисторсия для камеры Аполлонов около 2%, искажения от перспективы или изменения главной оси относительно объекта доходит до 12%.
При изучении совпадений снимков LRO и Аполлон все погрешности складываются. В итоге они ни как не могут быть 2-4%.
К сожалению, в статье В. Пустынского данные погрешности для реперных объектов не обсуждаются.
> Для снимков Аполлон размеры валунов 9-25 пикселей или относительная погрешность измерения 4-11%.
Реперы на валунах устанавливаются с точностью до пикселя. Если из-за погрешностей репер "гуляет" от снимка к снимку даже в пределах 10 пикселей (что может случиться для более далеких валунов, но не для таких близких, как t1-t4), этому соответствует лишь 1/390 доля размера снимка (т. к. размер использованных сканов 3900х3900 пикселей), или всего 0,25 %. В угловых единицах, это меньше 0,2 градуса, т. к. угол поля зрения кадра - около 50 градусов. Для более близких объектов, таких, как валуны t1-t4, погрешности еще ниже.
> Для снимков LRO при разрешении 0,5-1 пиксель и размерах валунов 1-5 пикселей, длине тени 2-20 пикселей относительная погрешность составит от 5 до 100%.
Положение таких больших валунов на снимках LRO определяется с точностью не хуже 1 метра, то есть с точностью выше, чем размер самого валуна. На расстояниях 100 м от ЛМ и более это составляет менее 1 % относительной погрешности. Гораздо более существенно перспективное искажение самих снимков LRO, однако на масштабах в сотни метров неравномерность этого искажения мала; поэтому грубая коррекция перспективы позволяет привести снимки к плоской проекции с точностью в единицы процентов. Так что точность позиционирования предметов на снимках LRO никак не хуже 5 %, а скорее всего, лучше 3 %.
> Наконец, дисторсия для камеры Аполлонов около 2%, искажения от перспективы или изменения главной оси относительно объекта доходит до 12%.
Дисторсия объектива - менее 0,002 мм на расстоянии 25 мм от оптической оси и менее тех же 0,002 на расстоянии 35 мм от опрической оси. Это составляет не более 0,01 %. Перспективные искажения не играют никакой роли, так как самый принцип фотограмметрического анализа состоит в расчете положения объектов на основе их различной фотографической перспективы на снимках, сделанных из разных точек. Сама фотограмметрия основана на различии этой перспективы.
> При изучении совпадений снимков LRO и Аполлон все погрешности складываются. В итоге они ни как не могут быть 2-4%.
Тем не менее, она именно такова. Погрешность перспективной коррекции снимков LRO - меньше 3 %, погрешность фотограмметрического анализа, связанная с неточностью установки реперов - того же порядка.
> К сожалению, в статье В. Пустынского данные погрешности для реперных объектов не обсуждаются.
Они очень детально обсуждаются в другой статье, которая готовится к журнальной публикации. Ее пока нет в сети. Там же обсуждаются методические вопросы уменьшения погрешностей, а также оценены сами погрешности.
Для материалов Аполлон-11. Вы определяете расстояние до валунов по параллаксу на основе изображений Аполлонов или на основе предположения, что валуны на снимках Аполлонов соответствуют валунам на снимках LRO?
Для материалов LRO. По снимку LRO места посадки Аполлон-11 мы можем:
1) Определить расстояние от ЛМ до валунов t1-t4. Погрешность составит не больше "разрешение/расстояние" или 1-2%.
2) Определить ширину и высоту валунов t1-t4 по размеру светлой точки и тени. Неопределённость измерений составит "разрешение/размер светлой точки или тени" или 10-100% в зависимости от номера валуна и снимка. С учетом серии снимков получаем среднее значение размеров валунов и среднеквадратичную погрешность.
Чтобы определять расстояния по снимкам LRO, нужно аккуратно исправить их перспективные деформации. Сделать это точно без специальных расчетов и фотограмметрии невозможно, но можно сделать это в первом приближении, пользуясь несколькими снимками. На масштабе расстояний порядка сотен метров остаточные погрешности составят единицы процентов. Можно взять 2 % за основу, хотя в некоторых местах, особенно с более выраженным вертикальным рельефом, погрешности могут быть и больше.
Размер валунов по снимкам определяется очень неточно, так как лишь немногие валуны больше предела разрешения. Видимый размер изображения небольших (порядка 1 м) валунов зависит больше от их яркости, чем от их действительного размера. Высота по тени оценивается неточно, так как тень ложится на негоризонтальную поверхность. Короче, размер таких валунов по снимкам LRO не измеряется, а лишь оценивается, и то очень примерно. Достаточно того, что есть качественное согласие между снимками с орбиты и с поверхности: самый маленький валун из трех ближайших и на снимках LRO выглядит самым маленьким, а самый большой - самым большим. А валун t1, хоть он и крупнее других (по-видимому), находится дальше других и стоит в низине, так что скрыт складкой местности, что тоже видно и с орбиты, и с поверхности. В общем, на видимые размеры на снимках LRO ориентироваться вообще не стоит. И на снимках с поверхности не стоит. Взаимное относительное положение, фотограмметрия перспективных проекций дает результаты намного точнее и надежнее.
Бесспорно, взаимное относительное положение и анализ фотограмметрии вместе с видимыми размерами на снимках Аполлон и LRO дает убедительные результаты.
По поводу корректности фотограмметрии Vladislav Pustynski and Eric M. Jones В. вопросы остались те же.
Вы определяете расстояние до валунов по параллаксу на основе изображений Аполлонов или на основе предположения, что валуны на снимках Аполлонов соответствуют валунам на снимках LRO?
Откуда взяты значения ширины / высоты валунов, на основе снимков Аполлон-11 или LRO, был ли выполнен сравнительный анализ, какова погрешность?
> Бесспорно, взаимное относительное положение и анализ фотограмметрии вместе с видимыми размерами на снимках Аполлон и LRO дает убедительные результаты.
Да. Фотограмметрия http://www.workingonthemoon.com/Vlad/a11Photogrammetry.html дает убедительные и точные результаты. И с размерами все ОК.
> По поводу корректности фотограмметрии Vladislav Pustynski and Eric M. Jones В. вопросы остались те же.
Вам дали ответы уже на все вопросы, которые Вы задали. Как же они остались? Вы чего-то не поняли или не хотите понимать?
> Вы определяете расстояние до валунов по параллаксу на основе изображений Аполлонов или на основе предположения, что валуны на снимках Аполлонов соответствуют валунам на снимках LRO?
Снимки LRO никакого участия в фотограмметрии не принимают вообще. Вся фотограмметрическая работа велась исключительно с снимками, сделанными с поверности: там ведь все написано. На основе этих снимков определено положение объектов и камер. Лишь потом полученная карта расположения объектов и камер наложена на снимки LRO. Соответствие между фотограмметрическим и фотографическим (на снимках LRO) положением объектов установлена просто по их близкому совпадению. Когда репер, соответствующий какому-то валуну на снимках с поверхности, оказывается в непосредственной близости от сфотографированного LRO валуна - это позволяет отождествить соответствующий валун на орбитальных снимках с валуном на снимках с поверхности. Все просто, очень просто. И точно.
> Откуда взяты значения ширины / высоты валунов, на основе снимков Аполлон-11 или LRO, был ли выполнен сравнительный анализ, какова погрешность?
Повторяю: размеры валунов определялись по их размеру, видимому на произвольном конкретном снимке, сделанном с поверхности, исходя из углового размера валуна на снимке и расстояния от камеры до валуна, измеренного по карте, полученного фотограмметрическим методом. Поскольку валуны с разных точек видны несколько по-разному, такие определения достаточно грубы, соответственно результат округлялся. Никакого анализа размера валунов не делалось, т. к. это совершенно второстепенный вопрос, который требовал бы времени (чтобы измерять каждый валун на каждой фотографии, где он виден, и так для нескольких десятков штук). Может быть, отдельные размеры и содержат погрешности в десятки сантиметров. Но эти погрешности все равно неизбежны, так как дальние валуны мы не видим с боковых сторон, где их размеры могут существенно отличаться от их размеров в тех проекциях, которые нам доступны. Точность всех таких прикидок - десятки сантиметров, что и указано возле каждого размера, типа "Height ~1.3 m, width ~2.3 m", иногда с обсуждением типа "The portion visible in 5887 is about 1 m. The height cannot be estimated from EVA photos since the base of the boulder is obliterated by the wall of Little West. We see about 1 m of its upper portion on 5887. The t1 shadow length in the Dec 2009 LROC image is ~8 m. With the Sun at an elevation of 8.2 degrees, the inferred height is 1.2 m".
Все это прикидочные оценки, не имеющие прямого отношения к фотограмметрическому позиционированию и отождествлению валунов.
Окей! Где в статье "Photogrammetric Analysis Of Apollo 11 Imagery: New camera-station map with improved locations" описана методика работы со снимками с поверхности Аполлон-11, какие Вы применяете преобразования, какую получаете сетку искажения при изучении стереоскопического эффекта, какое расстояние до валунов согласно стереоэффекту, какие рассматривались стереоскопические явления, какая конкретно неопределенность стереопар? Наконец, причем здесь программа ImageModeler, которая преобразует плоское изображение в трехмерное (как программа помогает получению стереофотографий)? Показанный десяток анаглифов не дают ответы на эти вопросы. Сказать, что мол всё есть и на этой базе выполнено - это то же, что рассказ Барона Мюнхаузена о том, как он летал на Луну. Вами ничего этого не было сделано. Вместо этого Вами на основе плоских снимков Аполлон-11 построена трехмерная картина. После этого Вы пишите, что соответствие между фотограмметрическим и фотографическим (на снимках LRO) положением объектов установлено по их близкому совпадению. Когда репер, соответствующий какому-то валуну на снимках с поверхности, оказывается в непосредственной близости от сфотографированного LRO валуна. Какая конкретно величина этого совпадения для валунов? В статье не указано. Данный вопрос не обсуждается. Более того, вы пишите, что "никакого анализа размера валунов не делалось..."
Не был выполнен анализ размеров валунов и сравнение результатов для Аполлон-11 и LRO!!!
Тогда на каком основании в статье написано "видимые размеры (ширина / высота) t1, t2, t3 и t4 валунов 2.3/1.2 м (t1), 0.5/1.0 м (t2), 2.5/1.2 м (t3), и 1.5/1.2 м (t4)"?!
Как в статье можно заявлять о совпадении валунов на снимках Аполлон-11 и LRO с точностью 2-4%?!
> Где в статье "Photogrammetric Analysis Of Apollo 11 Imagery: New camera-station map with improved locations" описана методика работы со снимками с поверхности Аполлон-11
Методика детально описана в статье, которая готовится к журнальной публикации в рецензируемом журнале. В статье на сайте изложены в основном результаты.
> какие Вы применяете преобразования, какую получаете сетку искажения при изучении стереоскопического эффекта
Никаких преобразований и никаких "сеток искажения" не применяется. Применяется компьютерный фотограмметрический софт, который решает задачу фотограмметрии изображений.
> какое расстояние до валунов согласно стереоэффекту, какие рассматривались стереоскопические явления, какая конкретно неопределенность стереопар?
Фотограмметрические расстояния до валунов показаны на карте, они на ~2 % - 4 % отличаются от фотографических. Никаких "стереоскопических явлений" для данных конкретных валунов не рассматривались, рассматривалась и решалась фотограмметрическая задача. Вопросы погрешностей обсуждаются в готовящейся статье, на расстоянии 100 - 200 м погрешности в этой области составляют до 5 %.
> Наконец, причем здесь программа ImageModeler, которая преобразует плоское изображение в трехмерное (как программа помогает получению стереофотографий)?
Эта программа использована для решения указанной фотограмметрической задачи. С ее помощью определяется (на основе набора 2-мерных фотографических проекций) истинное положение объектов и камер в 3-мерном пространстве.
> Показанный десяток анаглифов не дают ответы на эти вопросы.
Анаглифы и не должны давать ответы. Это всего лишь анаглифы.
> Сказать, что мол всё есть и на этой базе выполнено - это то же, что рассказ Барона Мюнхаузена о том, как он летал на Луну. Вами ничего этого не было сделано.
Вообще рассказы о методике - это не более чем рассказы о методике. Они будут опубликованы (в достаточно подробном виде), но никакие рассказы о методике не дают столь хорошего представления о результате, сколь сами результаты. А результаты изложены и продемонстрированы. Их не оспоришь.
> Вместо этого Вами на основе плоских снимков Аполлон-11 построена трехмерная картина. После этого Вы пишите, что соответствие между фотограмметрическим и фотографическим (на снимках LRO) положением объектов установлено по их близкому совпадению. Когда репер, соответствующий какому-то валуну на снимках с поверхности, оказывается в непосредственной близости от сфотографированного LRO валуна. Какая конкретно величина этого совпадения для валунов? В статье не указано. Данный вопрос не обсуждается.
Да Вам ведь сказано уже: примерно 2-4 % процента по дальности для конкретных четырех валунов, плюс примерно 1 градус по азимуту. На верхнем из рисунков http://www.workingonthemoon.com/Vlad/a11LROCDec09_q1t-4v1-6.jpg показано, как это выглядит на практике: зеленым отмечено фотографическое положение валунов на снимке LRO, красным - фотограмметрическое положение. Это на самом деле старый вариант, основанный на ограниченном числе снимков (и исправление перспективы снимков LRO не вполне независимое), но существует более новый вариант (скоро он появится на сайте), основанный на полном комплекте снимков и с лучшим исправлением перспективы снимков LRO. Там соответствие еще выше. Однако общее представление дает и старая версия.
> Более того, вы пишите, что "никакого анализа размера валунов не делалось..." Не был выполнен анализ размеров валунов и сравнение результатов для Аполлон-11 и LRO!!! > Тогда на каком основании в статье написано "видимые размеры (ширина / высота) t1, t2, t3 и t4 валунов 2.3/1.2 м (t1), 0.5/1.0 м (t2), 2.5/1.2 м (t3), и 1.5/1.2 м (t4)"?!
Я уже объяснил: это оценки, сделанные по одной фотографии и округленные. Они сделаны по видимому угловому размеру и по дальности, промеренной с помощью фотограмметрии. Это довольно приблизительные оценки. Более точные оценки не имеют смысла, т. к. максимальный размер валуна в недоступных по фотографиям проекциям может быть больше. Точность определения размеров столь небольших валунов по снимкам LRO совсем не велика, т. к. их размер лишь немногим выше предела разрешения. Существует хорошее качественное и количественное согласие между размерами, видимыми на снимках LRO и на снимках с поверхности. Высокоточное согласие при измерении ~1-метровых величин по снимкам разрешением 0,5 м невозможно в принципе, это заведомо известно.
Так чего Вам не хватает, с чем Вы пытаетесь спорить?
> Как в статье можно заявлять о совпадении валунов на снимках Аполлон-11 и LRO с точностью 2-4%?!
Так можно, что фотограмметрическое положение реперов, соответствующих валунам на 3-мерной реконструкции, совпадает с фотографическим положением валунов на снимках LRO с точностью до 2-4 %. Ну что тут еще может быть непонятно? Сравниваем фотограмметрическую карту со снимками LRO и видим именно такое совпадение. По-моему, тут не может быть никаких проблем с пониманием.
Вениамин, прежде начинают с методики и её обсуждения, а не с результатов. Это правило любых научных конференций и статей.
Очевидно, статья "Photogrammetric Analysis Of Apollo 11 Imagery: New camera-station map with improved locations" забегает вперед, но работа очень понравилось из-за хорошего оформления и новой идеи.
В методике есть заложенные ошибки. Методика на основе программа ImageModeler не проверяет есть ли искусственная имитация ландшафта (как это было сделано Красильниковым - снимки сводились программой сшивки в панораму, стереоэффект искажался, но были получены красивые стереопары, при этом не приводилась сетка преобразований и не изучалась). Очевидно, методика зависит от выбора реперных точек и поверхностей. Это значит, что есть высокая субъективная погрешность.
Вы можете забросить два вида трехмерной картинки на основе изображений Аполлон-11 (с не большего расстояния над поверхностью и с высоты)? Как Вы приводили 3D изображение А-11 к снимку LRO? Какая погрешность преобразований?
Если размеры объектов не исследуются, тогда данный факт указывается в статье, как об определении расстояний до объектов с неточными размерами. Очевидно, чтобы говорить о корректном совпадении валунов на снимках Аполлон-11 и LRO с точностью 2-4% говорят не только об их отстаянии, но и о размерах объектов.
> Вениамин, прежде начинают с методики и её обсуждения, а не с результатов. Это правило любых научных конференций и статей.
В третий раз повторяю: методика очень детально обсуждается в статье, которая готовится для публикации в научном журнале. На сайте находится не научная статья, а представление наиболее интересных результатов, с максимальной иллюстративностью.
> Очевидно, статья "Photogrammetric Analysis Of Apollo 11 Imagery: New camera-station map with improved locations" забегает вперед, но работа очень понравилось из-за хорошего оформления и новой идеи.
Спасибо. Но вперед там никто не забегает. Краткое изложение методики имеется, бОльшее вряд ли требуется и не так уж интересно. Там результаты - главное.
> В методике есть заложенные ошибки. Методика на основе программа ImageModeler не проверяет есть ли искусственная имитация ландшафта (как это было сделано Красильниковым - снимки сводились программой сшивки в панораму, стереоэффект искажался, но были получены красивые стереопары, при этом не приводилась сетка преобразований и не изучалась).
Задачей не является проверка искусственности чего-либо. Задачей было уточнение карты расположения станций, отождествление объектов, видимых на снимках LRO и на поверхностных снимках. Эта задача решена с неплохой точностью. Объекты лоцируются вплоть до дальностей порядка 400 м. Если кому-то угодно думать, что ландшафт масштабом несколько сотен метров в поперечнике был создан кем-то искусственно, а теперь он с высокой точностью совпал со снимками LRO высокого разрешения - пожалуйста, дело хозяйское. Никаких методических ошибок в этом нет: фотограмметрическим методом невозможно доказать, что американцы не построили большой кусок Луны на земле, причем в высоком разрешении.
> Очевидно, методика зависит от выбора реперных точек и поверхностей. Это значит, что есть высокая субъективная погрешность.
Методика зависит от выбора реперов так же, как результат любого эксперимента зависит от проведенных измерений. При построении модели область в окрестностях сотен метров от модуля была покрыта несколькими сотнями реперов, никакого места "субъективной погрешности" при этом нет: в качестве реперов выбираются наиболее удобные объекты, чье положение лучше всего отслеживается на разных фотографиях. Не пытайтесь найти черную кошку в темной комнате, когда ее там нет.
> Вы можете забросить два вида трехмерной картинки на основе изображений Аполлон-11 (с не большего расстояния над поверхностью и с высоты)?
3-мерной картинки, по сути, нет. Есть координаты нескольких сотен точек в трехмерном пространстве, плюс координаты и ориентационные углы 121 камеры.
> Как Вы приводили 3D изображение А-11 к снимку LRO?
Координаты реперов и камер проецировались на плоскую поверхность (то есть исключалась вертикальная координата), полученная плоская карта накладывалась на снимки LRO с исправленной перспективой.
> Если размеры объектов не исследуются, тогда данный факт указывается в статье, как об определении расстояний до объектов с неточными размерами.
В тексте указано, каким образом определялся размер валунов, этого достаточно. То, что размер валунов не имеет никакого отношения к определению фотограмметрического положения объектов, очевидно само собой.
> Очевидно, чтобы говорить о корректном совпадении валунов на снимках Аполлон-11 и LRO с точностью 2-4% говорят не только об их отстаянии, но и о размерах объектов.
Повторяю еще раз: размеры объектов совпадают в пределах той (низкой) точности, что обеспечивают снимки LRO. Никаких расхождений нет. И размер никак не участвует в отождествлении. Если бы точность определения была бы, скажем, 10 метров, и на этом участке было бы несколько возможных кандидатов - тогда было бы, о чем говорить. Такие ситуации бывали в нескольких местах, но в таком случае лучше просто отказаться от отождествления вовсе (что и делалось), потому что отождествление по размеру слишком неточно. Отождествлялись только те валуны, где никаких альтернатив нет. Это в полной мере относится к четверке t1-t4.
Ждать придется, пока не будет сдано, отрецензировано, принято к публикации и опубликовано. :) На это уйдет не один месяц.
Тестировать на искусственных панорамах особой нужды нет: это коммерческая программа, и она достаточно протестирована. :)
Главный же результат доступен уже сейчас, и он такой, что со снимками "Аполлона-11" все в полном порядке. Никаких гигантских расхождений, которые Вы получили, нет и в помине. Вы пользовались слишком грубыми методами, и Ваши результаты отражают только грубость Ваших методов, ничего больше. Точная фотограмметрия показывает, что между снимками с поверхности и снимками LRO нет никаких расхождений в пределах погрешности.
Снимки LRO разных мест посадки можно взять здесь: http://www.apollo.mem-tek.com/LRO_NAC_Apollo_Images.html
Да! Радиус примерно 100 метров площадки и проекция удаленных объектов на экран для имитации лунного ландшафта. Достаточно несколько десятков сотрудников и декорацию можно сменить на другую. Все материалы Аполлонов сняты таким образом. Просто!
Ваша методика не тестирует ни стереоэффект, ни симуляцию. В этом заключается главная субъективная погрешность. Очевидно, выбором реперной поверхности в программе ImageModeler можно задать такой экран. Это и есть решение задачи доказательства симуляции миссии Аполлон. Поставленной задачей - поиск совпадений - Вы искажаете результат.
Чтобы говорить о точности или грубости методик проводят сравнение. У Вас: Выбор 100 реперных точек и решение в их окрестности. Не контролируются преобразования. Есть скрытый выход за пределы оптических преобразований. Есть субъективная погрешность. Методика не протестирована на имитацию реального ландшафта. По Ligaspace: Применение преобразований к миллиону точек. Контроль оптических и не оптических преобразований. Графическое решение системы уравнений из нескольких миллионов точек в рамках оптических преобразований. Решение системы из миллиона уравнений в рамках проверки симуляции ландшафта и получение сетки искажения. Методика протестирована на имитацию реального ландшафта. Как видим, использованная методика в статье "Photogrammetric Analysis Of Apollo 11..." грубее, чем метод Ligaspace, Ваш подход решает одну задачу - сопоставление объектов ландшафта на снимках без проверки имитации.
Ваш подход можно использовать в обратной последовательности, когда по снимкам Аполлон редактируют снимки LRO.
Как например здесь.
Готовятся картинки на основе 12 July 2009 Second Pass 05:06:36 UTC; Solar El/Az 8.2/270.2; LRO Altitude 113 km; resolution 1.22 m/pixel и 05 January 2010 13:46:07 UTC; Solar El/Az 6.4/269.8; LRO altitude 41 km; resolution 0.48 m/pixel
Такое изменение объектов на снимках LRO подобное как было
Знаменитый снимок Аполлонов с официального сайта НАСА, указывающий на наличие фотомантажа. last modified 16-Aug-2004. Геолог-астронавт Харрисон Шмит, пилот лунного модуля Аполлон-17, рядом с американским флагом во время выхода на поверхность Луны в последней лунной миссии в серии "Аполлон". Самая высокая часть флага направлена к нашей планете. Image: AS17-134-20384
> Радиус примерно 100 метров площадки и проекция удаленных объектов на экран для имитации лунного ландшафта. Достаточно несколько десятков сотрудников и декорацию можно сменить на другую. Все материалы Аполлонов сняты таким образом. Просто!
Боюсь, Вы не поняли цифру. Совпадение объектов на поверхности прослеживается на расстояниях порядка 400 м от лунного модуля, так что поперечник площадки, где совпадение прослежено, превышает 600 метров. Рельеф на этой площади соответствует рельефу на снимках LRO. Это относится не только к отдельным камням и кратерам, но и к вертикальному рельефу (складки местности, повышения и понижения, валы кратеров). Детали см. в статье. Так что Вам придется допустить, что либо на земле была воссоздана лунная поверхность в десятки гектаров с точностью порядка метра, либо что был воссоздан по крайней мере ее периметр, и весь соответствующий участок на снимке LRO был заменен на подделанный на земле рельеф.
Не забывайте также, что рассматривалось только место посадки "Аполлона-11", где астронавты не удалялись от модуля более чем на ~60 м, и просматриваемая поверхность ограничена. Для остальных экспедиций масштаб подделки должен быть на порядок, а то и два порядка более впечатляющим. Подумайте об этом.
> Ваша методика не тестирует ни стереоэффект, ни симуляцию. В этом заключается главная субъективная погрешность.
Боюсь, Вы опять не поняли сущности. То, что Вы называете "стереоэффектом", на самом деле есть другое название дифференциальной фотографической перспективы на снимках, сделанных с разных точек. Сам принцип, сама сущность фотограмметрического метода основаны на исследовании этой дифференциальной перспективы и восстановлении 3-мерного расположения предметов на основе должного учета этой перспективы. Поэтому Ваша претензия бессодержательна по своей сути.
Что Вы подразумеваете под "тестированием симуляции", непонятно. В работе восстановлена 3-мерная сцена, определены положения предметов в 3-мерном пространстве. Фотограмметрией невозможно определить, каким образом эти предметы появились там, где они обнаружены и где они находятся: поместили ли их там рельефообразующие факторы, действующие на поверхности Луны, или это сделали отряды землекопов.
> Очевидно, выбором реперной поверхности в программе ImageModeler можно задать такой экран. Это и есть решение задачи доказательства симуляции миссии Аполлон.
Совершенно непонятно, что Вы называете "реперной поверхностью". Никаких реперных поверхностей при фотограмметрическом анализе не задается, и уж тем никаких плоских поверхностей.
> Поставленной задачей - поиск совпадений - Вы искажаете результат.
Неужели я недостаточно ясно объяснил, что поиск совпадений производился ПОСЛЕ получения результирующей 3-мерной сцены, что проекция УЖЕ ПОЛУЧЕННОЙ сцены накладывалась на снимки LRO для поиска совпадений?! Таким образом, поиск совпадений никаким образом не мог повлиять на результат даже в принципе - точно так же, как сопоставление карты местности с фотографией местности никак не может исказить карту.
> Чтобы говорить о точности или грубости методик проводят сравнение. У Вас: Выбор 100 реперных точек и решение в их окрестности. Не контролируются преобразования. Есть скрытый выход за пределы оптических преобразований. Есть субъективная погрешность. Методика не протестирована на имитацию реального ландшафта.
Боюсь, Вы написали бессмысленный набор слов. Решение не ищется в окрестности выбранных трех сотен реперов, реперы - это реперы. Никаких преобразований не производится, поэтому и контролировать нечего. "Скрытый выход за пределы оптических преобразований" - вообще непонятно, к чему это и о чем это. Программа выполняет расчеты в соответствии с заложенными в нее фотограмметрическими алгоритмами, никуда за их пределы не выходя ни скрыто, ни явно. "Субъективная погрешность" при этом нигде не есть - ей просто нет места.
> По Ligaspace: Применение преобразований к миллиону точек. Контроль оптических и не оптических преобразований. Графическое решение системы уравнений из нескольких миллионов точек в рамках оптических преобразований. Решение системы из миллиона уравнений в рамках проверки симуляции ландшафта и получение сетки искажения. Методика протестирована на имитацию реального ландшафта.
Вы меня извините за откровенность, я не хочу Вас расстраивать. Но то, что у Вас сделано - это большей частью практически мусор. Все эти искусственные деформации снимков "Фотошопом" - это просто за гранью добра и зла, совершенно бессмысленная деятельность; и все эти Ваши "сетки искажений" есть ненужная и бессмысленная чепуха. Попытки оценить расстояния по стереопарам более осмысленны, но эти оценки сопряжены с большими ошибками. Во-первых, Вы игнорируете фотографическую перспективу в пределах одного снимка, во-вторых пользуетесь неточными положениями камер на карте из Preliminary report. Эта карта составлена грубым графическим методом и содержит местами заметные ошибки (видные даже невооруженным глазом). Соответственно параллактические базисы у Вас содержат заметные ошибки. А то, что Вы пытаетесь проводить измерения на невесть как искаженных фотографиях, усугубляет ситуацию. В итоге результаты Ваших оценок настолько грубы, что ими практически невозможно пользоваться, разве что в нулевом приближении.
> Как видим, использованная методика в статье "Photogrammetric Analysis Of Apollo 11..." грубее, чем метод Ligaspace, Ваш подход решает одну задачу - сопоставление объектов ландшафта на снимках без проверки имитации.
Думаю, здесь комментарий уже излишен. Я все сказал.
> Ваш подход можно использовать в обратной последовательности, когда по снимкам Аполлон редактируют снимки LRO.
Можно. Если допустить, что снимки LRO подделаны, то можно.
> Знаменитый снимок Аполлонов с официального сайта НАСА, указывающий на наличие фотомантажа.
Вениамин, стоп! Прежде, чем доказывать фотограмметрию в своей статьей, предоставьте на обозрение методику. Кстати, неясно - почему Вы не можете создать 3d-картинку. Программа ImageModeler предназначена для этого. Может быть из-за искажений? Ну а реперная поверхность - это задание поверхностей в программе ImageModeler, по которым программа строит 3d-картинку. Вы утверждаете, что её построили. В своей статье Вы не приводите методику (только ссылаетесь), размеры валунов указаны не правильные, это значит что есть ошибки в реперных точках и есть ошибки в угловом расстояние между валунами, использованы не к месту методики анаглифы. Это косвенно говорит о задаче подгонки результатов в статье и поспешности авторов. Именно так, здесь мы обсуждаем вопрос о подделке (или правдивости) снимков LRO и как это доказать. У Вас же подход односторонний - подгонка результатов.
По поводу метода ligaspace - это графический метод решения миллиона уравнений. Смотрите Разлом Rima Hadley. Американцы на Луне. Методика проверки фотоснимков Аполлонов. С графическим методом решения задач знакомятся еще в школе. Исследования показывают, что расстояния не соответствуют легенде НАСА, например, искусственный ров шириной 30-60 метров выдается за лунный разлом Rima Hadley с шириной 1200 метров; "удаленный ландшафт" проектируется на киноэкран, на его фоне снимаются "астронавты".
> Прежде, чем доказывать фотограмметрию в своей статьей, предоставьте на обозрение методику.
Мне жаль, но пока она не опубликована в журнале, я не могу выкладывать текст статьи (тем более, что у нее есть соавтор). Потом она будет общедоступна, обещаю. Также будет в открытом доступе файл данных с ImageModeler-а, так что все можно будет увидеть своими глазами в деталях. Однако я могу отвечать на вопросы, так что если что непонятно, спрашивайте.
> Кстати, неясно - почему Вы не можете создать 3d-картинку. Программа ImageModeler предназначена для этого.
Программа ImageModeler не предназначена для создания 3D-картинок. Она предназначена, в т. ч., для извлечения 3-мерных текстур для фотографий. Однако в нашем случае никаких 3-мерных поверхностей не выделялось (для такой поверхности, как ландшафт, это крайне трудоемко и совершенно бессмыслено). Картинки, которые я могу создать - это проекции множества реперных точек (400 с лишком) на произвольную плоскость. Такие проекции лишены наглядности, кроме проекций на плоскость ХY и плоскости, параллельные оси Z (вертикальной координате). Проекция на плоскость XY у Вас есть - это фотограмметрическая карта реперов (представлены не все реперы, а лишь представляющие интерес). Можно сделать дополнительно проекцию на какую-нибудь вертикальную плоскость, но какой в этом смысл? Все валуны выстроятся скопом около одной линии (с небольшими отклонениями от нее, соответствующими вертикальному рельефу).
> Может быть из-за искажений?
Искажения тут абсолютно не при чем. Повторяю, есть файл данных, он будет в открытом доступе. По нему все видно. Любой, кто захочет, сможет по этому файлу построить любую картинку.
> Ну а реперная поверхность - это задание поверхностей в программе ImageModeler, по которым программа строит 3d-картинку. Вы утверждаете, что её построили.
Вы что-то перепутали. Я никогда не утверждал, что построил что-то подобное. Наоборот, я утверждаю, что никакой "реперной поверхности" НЕ СУЩЕСТВУЕТ, ни в программе ImageModeler, ни где-либо еще. Вы говорите о несуществующей вещи. Существуют реперы - точки в 3-мерном пространстве. Существуют проекции этих точек на фотографиях (соответственно реперным объектам). По набору проекций реперных точек на различные фотографии строится 3-мерная сцена. О каких реперных поверхностях вообще идет речь?!
> В своей статье Вы не приводите методику (только ссылаетесь), размеры валунов указаны не правильные, это значит что есть ошибки в реперных точках и есть ошибки в угловом расстояние между валунами, использованы не к месту методики анаглифы.
Еще раз, наверное, уже в пятый. 1) Методика, по сути своей, изложена в руководстве пользователя к ImageModeler-у. Ознакомьтесь с этой методикой и Вы узнаете, как строится 3-мерная сцена по фотографиям. Никаких отличий в данном случае нет. Есть детали, которые касаются конкретных вопросов точности, они не играют никакой принципиальной роли, потому что в нашем обсуждении важен сам результат. Поскольку результат получен не для одного объекта, а для нескольких десятков, то одно лишь это позволяет оценить среднюю точность. Тонкости не важны. Если Вам они интересны, я уже сообщил Вам и конкретные аспекты точности: в 30-метровой окрестности ЛМ точность составляет порядка десятка см (при дифференциальной точности в единицы см), в 200-метровой - около 5 %. 2) Размеры валунов определены грубо и с округлением, по единственной проекции. Практически никакого отношения к фотограмметрическому позиционированию эти размеры не имеют. 3) Анаглифы использованы для иллюстраций, никакого отношения к фотограмметрическому позиционированию они не имеют.
> Это косвенно говорит о задаче подгонки результатов в статье и поспешности авторов. Именно так, здесь мы обсуждаем вопрос о подделке (или правдивости) снимков LRO и как это доказать. У Вас же подход односторонний - подгонка результатов.
Видите ли, полученные результаты очень легко проверить вручную. Фотограмметрическую задачу сложно решить, но проверить уже полученное решение не представляет большого труда. Вам это не приходилов голову? Вы заявляете о подгонке - но Ваше утверждение проверяется очень легко. Нет ничего проще, на самом деле.
> По поводу метода ligaspace - это графический метод решения миллиона уравнений. Смотрите Разлом Rima Hadley. Американцы на Луне. Методика проверки фотоснимков Аполлонов. С графическим методом решения задач знакомятся еще в школе. Исследования показывают, что расстояния не соответствуют легенде НАСА, например, искусственный ров шириной 30-60 метров выдается за лунный разлом Rima Hadley с шириной 1200 метров; "удаленный ландшафт" проектируется на киноэкран, на его фоне снимаются "астронавты".
Мне не хочется повторять то, что я уже сказал: Ваш "графический метод решения миллионов уравнений" есть просто мусор. Это просто бессмысленная деформация фотографий с бессмысленными результатами. Про Rima Hadley рассказывать не надо, бессмысленность Ваших результатов мы можем проверить здесь и сейчас на примере тех самых валунов t1-t4. Хотите? Давайте Вы выложите в чуть более крупном масштабе нижний снимок-карту http://ligaspace.my1.ru/image1/A11_kameny.gif , но не анимацию, а только тот вариант, который соответствует вычисленному Вами положению валунов. На этом же снимке-карте обозначьте точки, с которых, по-Вашему, были сделаны снимки 5872/73, 5913/36. Что может быть проще? Мы замерим по Вашему снимку-карте взаимные угловые расстояния между валунами, как они видны из указанных четырех точек. А потом мы измерим те же расстояния по самим снимкам 5872/73, 5913/36 и увидим, соответствует ли Ваша карта расположения валунов тому, что видно на снимках с поверхности. А потом мы проделаем то же самое с моей картой: расположение валунов мы возьмем по снимку LRO и замерим угловые расстояния между ними из тех точек, где были сделаны снимки согласно найденным мною положениям камер 5872/73, 5913/36. И сопоставим уже мой результат с теми угловыми расстояниями, что видны на снимках с поверхности.
Сам сейчас проверил шутки ради 5872 и 5913. Точность моих угловых расстояний - единицы десятых долей градуса, т. е. лучше углового размера валунов на фото. Чего и следовало ожидать. Ваши угловые расстояния идут полным лесом. Нет даже отдаленного сходства. И не может быть.
В общем, поместите карту расположения валунов "по-Вашему", обозначте на ней Ваши положения 4-х валунов t1-t4 маленькими точками. Обозначьте также маленькими точками положения камер 5872/73, 5913/36, можно добавить 5887. Сами все увидите, легко и быстро. Авось поможет трезво оценить Ваш "графический метод решения миллионов уравнений". ;)
Поскольку речь идет о снимках LRO. Берут серию снимков с местом высадки Аполлон-11 и валунами t1-t4, материал у Вас был, приводят снимки к одному виду и фотограмметрическими измерениями определяют размер, высоту валунов и их удаленность от ЛМ. У меня получается (ширина / высота / удаленность) в метрах: t1=2,9-3,8 / 1,4-2,1 / 177,6-182,2 t2=1,3-1,9 / 0,62-0,73 / 122,5-124,9 t3=2,7-2, / 1,2-1,5 / 139,0-142,6 t4=1,68-1,73/0,55-0,68 / 136,3-138,8 Высота и удаленность могут быть уменьшены на 10% из-за масштабной поправки (правда это надо обосновать). Поправляйте, если что-то не так. Согласно Вашим данным - видимые размеры (ширина / высота / удаленность) валунов 2.3/1.2/163 (t1), 0.5/1.0/112 (t2), 2.5/1.2/129 (t3), и 1.5/1.2/127 м (t4). Разница заметная, как для валуна с номером, так и взаимная! Это указывает на несоответствие объектов на снимках Аполлон-11 и LRO, так же недостатки Вашей статьи.
Вениамин, у Вас чисто методически подход не с того конца.
Вы что-то определенно перепутали. У Вас в тексте статьи написано:
> Мы получаем, что расстояние от "астронавтов" до валунов 75-90 метров, относительная погрешность до 60%. В то время как снимки с LRO указывают, что расстояние до валунов 200-400 метров.
На картинке http://ligaspace.my1.ru/image1/A11_kameny.gif у Вас тоже что-то очень сильно бегает в больших пределах.
Теперь же Вы выписываете какие-то расстояния от 122 до 182 метров, причем непонятно, откуда это измерено (от центра ЛМ?) и, главное, как это измерено. Это Вы так померили снимки LRO? Похоже на то, но тогда при чем тут снимки "Аполлона-11"? Расхождение между Вашими и моими расстояниями тогда связаны только с тем, что Вы не учли перспективную деформацию снимков LRO. И почему тогда Вы в статье писали про 200-400 метров?
Или Вы получили эти расстояния из снимков с поверхности? Тогда, во-первых, почему у Вас в статье написано 75-90 метров, а во-вторых, дальности без азимутов мало ценны.
Еще раз предлагаю. Возьмите снимок LRO и поставьте на нем 4 красные точки в тех местах, где, по-Вашему, должны находиться валуны согласно снимкам, сделанным на поверхности. Поставьте также желтые точки в тех местах, где, по-Вашему, находились камеры 5872/73, 5887, 5913, 5936. Мы по этой Вашей карте очень легко и быстро определим, насколько углы между Вашими валунами, видимые из точек расположения Ваших камер, соответствуют тому, что видно на снимках 5872/73, 5887, 5913, 5936. Потом я покажу Вам, где располагались указанные камеры. И мы, ориентируясь на валуны на тех местах, где они в действительности присутствуют на снимках LRO, увидим, видны ли они из мест расположения "моих" камер под теми углами, что имеются на снимках "Аполлона-11".
Все ведь очень просто. Выкладывайте снимок с теми положениями валунов, что предлагаете Вы. Или хотите, чтоб я воспользовался Вашей картинкой http://ligaspace.my1.ru/image1/A11_kameny.gif ? Ведь это Вы ее рисовали. Там скверное разрешение и не указаны положения камер, но я могу поставить их за Вас. Или Вы сами их поставите. А? Давайте. Будет мало слов и много дела.
Да! Стереоскопический эффект снимков Аполлон-11 указывает на 75-90 метров до валунов с погрешностью 60%, далее следует киноэкран с изображением удаленного ландшафта. 200-400 метров по LRO будет уточнено на 140-345 метров (345 - это валун v2). Однако, надо решить вопрос с масштабной поправкой 10%(?) по удаленности и высоте валунов. Спасибо за поправки.
122-182 метров определяется по серии снимков LRO - от центра LM к каждому валуну t1-t4, серия снимков приводится к LROC 05 Jan 2010; Solar El/Az 6.4/269.8; 41 km; 0.48 m/pixel. У Вас 112-163 метров как для Аполлон-11, так и по одному снимку от 22 December 2009 LROC. Различие качественное и существенное. Кстати, почему Вы не идентифицируете t0. Это валун первый с левой стороны по материалам Аполлон-11, за ним идут по порядку t1-t4 - http://ligaspace.my1.ru/image1/A11_kameny.gif? Или этому валуну нет места в материалах LRO? На данной гиф-анимации снимка LRO камни t0-t4 выставлены на основе анализа стереоскопического эффекта снимков Аполлон-11 - для наглядности, что никаких более 100 метров нет. Из-за недоверия вашему подходу - подгонка - пока отложим эксперимент с моими координатами положений камней.
В статье у Вас так же есть противоречие в положение группы камней v и q1!
> Да! Стереоскопический эффект снимков Аполлон-11 указывает на 75-90 метров до валунов с погрешностью 60%, далее следует киноэкран с изображением удаленного ландшафта.
Это разве что для Вас. На самом же деле по фотографиям очень легко убедиться, что валуны находятся на расстояниях 100-200 м, и это элементарно проверяется по снимкам LRO. Я с высокой точностью знаю, из каких точек велась съемка, и всего нескольких минут достаточно, чтобы убедиться, что вид на валуны из этих точек полностью соответствует, в пределах небольшой погрешности, снимкам LRO.
> 200-400 метров по LRO будет уточнено на 140-345 метров (345 - это валун v2). Однако, надо решить вопрос с масштабной поправкой 10%(?) по удаленности и высоте валунов. Спасибо за поправки.
Ближайший валун находится на расстоянии ок. 110 метров. Вопрос с перспективной деформацией снимков решается в пределах единиц % точности. Для независимости, я пользуюсь поправками, введенными другим человеком, чтобы не ставить свои результаты в зависимость от своих же поправок. Ранее я делал эти поправки самостоятельно, результаты качественно не отличаются. Впоследствии, если кто-нибудь сделает аэрофотограмметрию этих снимков и если будет доступна их картографическая проекция, результаты можно будет сопоставить еще точнее. Но разница составит не более единиц %, в этом можно не сомневаться. Размер области достаточно мал.
> 122-182 метров определяется по серии снимков LRO - от центра LM к каждому валуну t1-t4, серия снимков приводится к LROC 05 Jan 2010; Solar El/Az 6.4/269.8; 41 km; 0.48 m/pixel. У Вас 112-163 метров как для Аполлон-11, так и по одному снимку от 22 December 2009 LROC. Различие качественное и существенное.
Снимки LROC имеют перспективную деформацию (чаще растяжение по долготе). Если ее не исправить, то будут расхождения в несколько процентов (чаще в сторону увеличения долготных расстояний). Мои цифры приведены по снимкам с исправленной перспективной деформацией. Из этого и возникают расхождения.
> Кстати, почему Вы не идентифицируете t0. Это валун первый с левой стороны по материалам Аполлон-11, за ним идут по порядку t1-t4 - http://ligaspace.my1.ru/image1/A11_kameny.gif? Или этому валуну нет места в материалах LRO?
Слева от указанной группы имеется немало камней, вблизи West даже довольно крупных. К сожалению, эта область видна лишь на снимках 5865/87, которые вдобавок имеют в этом направлении столь малый параллакс, что точное определение расстояний по ним проблематично. Однако эта пара дает азимуты камней. По азимутам были отождествлены 4 камня на снимках LRO (в старой версии на сайте указан только один из них, q1). Кроме того, многие камни в этой области скрыты рельефом местности: местность здесь несколько волнистая, ложбины чередуются подъемами с перепадами высот порядка метра. Это хорошо видно на снимках LRO.
> На данной гиф-анимации снимка LRO камни t0-t4 выставлены на основе анализа стереоскопического эффекта снимков Аполлон-11 - для наглядности, что никаких более 100 метров нет. Из-за недоверия вашему подходу - подгонка - пока отложим эксперимент с моими координатами положений камней.
Зачем же откладывать и при чем тут мой метод и Ваше к нему доверие? Вы проанализировали свой стереоскопический эффект? Выставили камни t0-t4? Прекрасно, вот мы и займемся Вашим анализом и его результатами. Чего тут ждать? Пожалуйста, сделайте, о чем прошу: добавьте на этот снимок положения хотя бы нескольких из камер 5972/73/87, 5913/36. Сделайте это Вы, если не хотите, чтобы это сделал за Вас я. А то потом начнется история: "А вы, мол, не туда камеры поставили, они на самом деле в других местах стоят". Давайте-давайте, поставьте камеры и мы сравним результаты Вашего "анализа стереоскопического эффекта" с тем, что мы видим на снимках "Аполлона-11".
> В статье у Вас так же есть противоречие в положение группы камней v и q1!
В старом варианте опечатка при обозначении камня q1 на фото 5887. На 5865 этот камень обозначен правильно. Не представляет никакого труда показать, что его положение на снимках LRO полностью соответствует его положению на снимках "Аполлона-11".
Вениамин, о чём тогда говорить, если Вы не можете обосновать выбор масштаба снимков LRO! А если на 5-10% больше меньше по X и Y? Тогда Ваши данные с 2-4% точностью удаленностью не имеют смысла. Начните с обоснования выбора масштаба. Может быть связано с разным разрешением по X и Y для снимков LRO?
Вы пишите опечатка по q1! А как с явным ляпосом v6?
Еще раз: масштаб снимков LRO известен с точностью до единиц %. Сравнение фотограмметрической карты произведено со снимками, где перспектива исправлена до единиц %, скорее всего, не хуже 2 %. Таким образом, даже в худшем случае, при сложении ошибок, точность отождествления будет составлять около 5 %, в лучшем может оказаться ниже % (и оказывается, в ряде случаев). Поэтому никакой проблемы нет. Исправить перспективу снимков LRO точнее невозможно простыми деформациями, для этого нужно корректное преобразование перспективы, неравномерное по полю. Это трудоемкая процедура, требующая аэрофотограмметрических работ. Для моих задач это совершенно лишняя вещь, ловля блох. Точности около 2 % вполне достаточно.
С v6 все в полном порядке (в новой версии он будет переименован, но это неважно). Он отождествляется один в один, репер на фотограмметрической карте ложится в точности на изображение этого валуна на снимке LRO. Не представляет никакого труда доказать, что его положение на снимках "Аполлона-11" полностью соответствует его положению на орбитальных снимках.
А почему Вы так боитесь проверить свое решение? Сколько Вас ни прошу выложить Вашу карту валунов (как они должны располагаться на снимках LRO по-Вашему) и обозначить точки съемки - Вы все бегаете от проверки и молчите, как воды рот набрав. Вы боитесь, что Ваша карта никак не будет соответствовать снимкам "Аполлона-11"? Не будет, конечно, Вы это уже поняли, верно? Вы боитесь увидеть правду своими глазами или боитесь, что ее увидят другие?
Вениамин, вы не можете обосновать выбор масштаба снимков LROC! Точность у Вас, согласно написанному Вами, в худшем варианте 2+4=6%! Внимательнее посмотрите на положение камня v6 - смотрите иллюстрации сообщение 11. Повторю: из-за недоверия вашему подходу - подгонка и методические нарушения - пока отложим эксперимент с моими координатами положений камней.
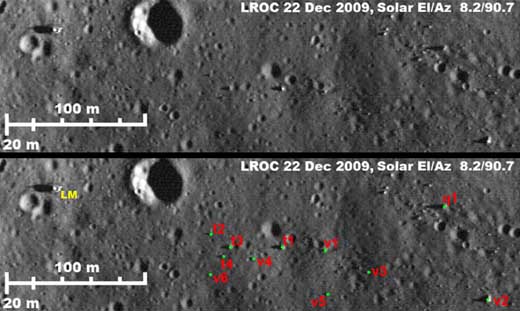
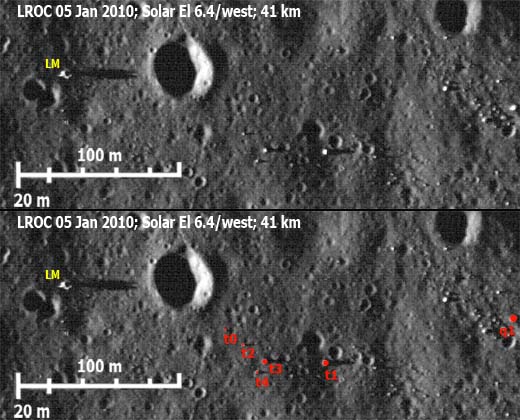
Давайте будем придерживаться строгой методики. Ниже на снимке LROC показаны положения валунов t0-t4 и q1. Данная иллюстрация имеет разрешение 0.60 м/пиксель по оси Х и У.
Ниже представлена гиф-анимация на основе серии снимков LROC: 12 Jul 2009; Solar El 10.2/west; 22 Dec 2009; Solar El 8.2/east; 05 Jan 2010; Solar El 6.4/west; 7 Feb 2010; Solar El 2.0/west; 18 Jun 2010; Solar El 10.8/east с разрешением 0,60 m/pixel.
Илл. 2. Серия снимков LROC: 12 Jul 2009; Solar El 10.2/west; 22 Dec 2009; Solar El 8.2/east; 05 Jan 2010; Solar El 6.4/west; 7 Feb 2010; Solar El 2.0/west; 18 Jun 2010; Solar El 10.8/east с разрешением 0,60 m/pixel, которые приведены к LROC 05 Jan 2010; Solar El 6.4/west; 41 km с разрешением 0,42 m/pixel по Х и У. Посмотреть с большим разрешением - 0,21 m/pixel
Как мы видим, снимки LROC достаточно хорошо приводятся друг к другу с субпиксельной точностью. Использовались преобразования масштабирования по Х и У, а так же небольшой поворот. Никаких перспективных преобразований и сложных аэрофотограмметрических работ не применялось.
На основе фотограмметрических измерений определим размер, высоту валунов и их удаленность от ЛМ. Получаем (ширина / высота / удаленность) в метрах: t0= 0,4-0,8 / 0,2-0,4 / 93,9-95,1 t1=2,2-2,9 / 1,22-1,84 / 158,6-162,8 t2=1,0-1,45 / 0,54-0,64 / 110,4-112,5 t3=2,06-2,2 / 1,05-1,31 / 125,1-127,5 t4=1,28-1,33 / 0,48-0,59 / 123,0-125,2 q1= 3,6-4,2 / 2,0-2,4 / 264,0-269,2
Согласно Вашим данным - видимые размеры (ширина / высота / удаленность) валунов: не определен (t0), 2.3/1.2/163 (t1), 0.5/1.0/112 (t2), 2.5/1.2/129 (t3), 1.5/1.2/127 м (t4), 3.5/2/275 (q1). Разница между этими данными и Вашими - качественная, как для валуна с номером, так и взаимная!
Теперь мы можем перейти к фотограмметрическим измерениям валунов на основе снимков Аполлон-11 с поверхности:
Вид на t0 дают снимки: AS11-40-5872HR, AS11-40-5873HR, AS11-40-5887HR, AS11-40-5913HR, AS11-40-5936, AS11-40-5887.
Вид на t1-t4 снимки: AS11-40-5872HR, AS11-40-5873HR, AS11-40-5887HR, AS11-40-5888HR, AS11-40-5913HR, AS11-40-5936HR, AS11-40-5865.
Вид на q1 снимки: AS11-40-5865, AS11-40-5887.
Поправляйте, есть замечания? И опишите для читателей, как Вы определяли удаленность валунов по снимкам Аполлон-11?
> Вениамин, вы не можете обосновать выбор масштаба снимков LROC!
Повторяю: могу. Исправление перспективы выполнено не мной, его сделали совершенно независимо от меня и совершенно для других задач. Я воспользовался готовым результатом. Ранее я исправлял перспективу сам (в нынешнем варианте на сайте - именно мой исправленный вариант). Результаты мало отличаются.
> Точность у Вас, согласно написанному Вами, в худшем варианте 2+4=6%!
Это в самом плохом случае для самых неудачных ситуаций в наихудшем случае с перспективой. Однако ухудшение результатов для одних объектов (связанное с дополнительной коррекцией перспективы на 2 %) автоматически улучшило бы ее для других объектов в других областях, так что среднее по полю совпадение не изменилось бы.
> Повторю: из-за недоверия вашему подходу - подгонка и методические нарушения - пока отложим эксперимент с моими координатами положений камней.
Еще раз: при чем тут мой подход? Какое отношение мой подход имеет к Вашему? Вы отказываетесь проверять собственный результат, запомним. Это полная капитуляция? Хорошо, я Вам покажу Ваши ошибки без Вашей помощи.
> Как мы видим, снимки LROC достаточно хорошо приводятся друг к другу с субпиксельной точностью.
Никакой субпиксельной точности там нет, точность порядка метра-другого.
> На основе фотограмметрических измерений определим размер, высоту валунов и их удаленность от ЛМ.
То, что у Вас - это НЕ фотограмметрические измерения. Это неизвестно что, цифры с потолка.
> Напомню, что разница заметная, как для валуна с номером, так и взаимная!
Сейчас перемерил линейкой и вижу, что в цифрах в тексте на сайте все равно остались опечатки или старые цифры. Т. е. при обновлении надо будет исправить и их, а не только картинки. Это, очевидно, опечатки, потому что линейка нарисована правильно. Размеры тогда лучше брать прямо с картинки, беря расстояние от центра ЛМ в долях той линейки (между серединами штрихов), что к рисунку прилагается. Длина линейки на картинке 177 пикс. Расстояния до валунов (в пикселях / долях линейки / метрах):
t1 = 300 / 1,69 / 169 м t2= 207 / 1,17 / 117 м t3 = 235 / 1,33 / 133 м t4 = 232 / 1,31 / 131 м v6 = 228 / 1,29 / 129 м
Ограничимся этой пятеркой.
Если взять Ваш рисунок, то длина линейки 160 пикс (почему-то Вы сжали картинку по горизонтали), соответствующие расстояния до камней в пикселях/долях линейки/метрах:
t1 = 272 / 1,70 / 170 м t2= 189 / 1,18 / 118 м t3 = 216 / 1,35 / 135 м t4 = 212 / 1,33 / 133 м v6 = 209 / 1,31 / 131 м
Как видно, цифры с Вашего и с моего рисунка совпадают до 2 метров, это совершенно нормально, т. к. по фото с таким разрешением погрешность будет не ниже 2-3 %. Цифры, которые с Вашего рисунка получил я, регулярно выше Ваших на ~6 метров. Видимо, Вы измеряли от восточных элементов ЛМ, тогда как я везде измеряю от центра. Т. е. расхождение из-за полуширины ЛМ. Главное же, что цифры по Вашему и моему рисунку совпадают.
> Поправляйте, есть замечания?
Только одно: объект t0 не виден ни на одном из снимков. Он скрыт валом Little West. Поэтому его вообще оставляем.
Если Вы самостоятельно исправляли перспективу, тогда обоснуйте приведение снимка LRO и выбор масштаба.
Т.е. с положением камня v6 на Илл. 2 (см. выше сообщение 11) в Вашей статье опечатка?
"Длина линейки на картинке 177 пикс. Расстояния до валунов (в пикселях / долях линейки / метрах): t1 = 300 / 1,69 / 169 м t2= 207 / 1,17 / 117 м t3 = 235 / 1,33 / 133 м t4 = 232 / 1,31 / 131 м v6 = 228 / 1,29 / 129 м" Ок! А как с q1? На моих иллюстрациях длина масштабной линейки от левого до правого края - 166,5 пикселя на 100 метров (или 0,60 м/пиксель).
Еще раз разберитесь с t0, который наблюдается на снимках: AS11-40-5872HR, AS11-40-5873HR, AS11-40-5887HR, AS11-40-5913HR, AS11-40-5936, AS11-40-5887.
Ширина валуна определяется по длине границы тень-свет помноженная на разрешение 0,21 м/пиксель; высота валуна определяется по длине тени помноженная на тангенс угла и разрешение 0,21 м/пиксель. Можно отметить характерную особенность - основание камня примерно в два раза больше высоты!
В своей статье Вы не описываете, как определена удаленность валунов по снимкам Аполлон-11?
> Если Вы самостоятельно исправляли перспективу, тогда обоснуйте приведение снимка LRO и выбор масштаба.
Скажите, почему до Вас все доходит только с 3-го или 4-го раза? Я сколько должен повторить, что сейчас перспектива исправляется НЕ мной, что это делает ДРУГОЙ человек, что я это делал раньше, и что наши результаты совпадают с точностью до единиц %, и никакого принципиального различия между ними нет? Я это повторил уже раза три, не меньше, но Вы все не поймете.
> Т.е. с положением камня v6 на Илл. 2 (см. выше сообщение 11) в Вашей статье оп1ечатка?
Нет там опечатки, все нормально.
> Ок! А как с q1?
Да ну его, Вам что, мало прочих пяти штук, t1-t4 и v6? Ограничьтесь этой пятеркой, не разбрасывайтесь.
> На моих иллюстрациях длина масштабной линейки от левого до правого края - 166,5 пикселя на 100 метров (или 0,60 м/пиксель).
Что Вы считаете с точностью до полупикселя там, где точнее двух пикселей посчитать невозможно! Ловите блох, а пролетаете на слонах.
> Еще раз разберитесь с t0, который наблюдается на снимках: AS11-40-5872HR, AS11-40-5873HR, AS11-40-5887HR, AS11-40-5913HR, AS11-40-5936, AS11-40-5887.
Нету его там, закрыт он валом кратера. Если Вы думаете, что его видите - выложите фотографии с обозначениями.
> Ширина валуна определяется по длине границы тень-свет помноженная на разрешение 0,21 м/пиксель; высота валуна определяется по длине тени помноженная на тангенс угла и разрешение 0,21 м/пиксель.
Чепуха. При разрешении исходного кадра 0,5 м/пиксель точность определения ширины тени будет не лучше 2*0,5 = 1 метра, что сравнимо с шириной самого валуна. Что касается длины тени, то поверхность там неровная, волнующаяся, и тени падают на склоны. Так, тени от t2-t4 определенно падают по склону вниз, а t1 - по склону вверх. При низком солнце это искажает длину тени на десятки %, поэтому определить высоту валуна по длине тени можно только с очень низкой точностью. Смешно.
> Можно отметить характерную особенность - основание камня примерно в два раза больше высоты!
Зависит от камня.
> В своей статье Вы не описываете, как определена удаленность валунов по снимкам Аполлон-11?
По фотограмметрическим координатам. Вы уже успели забыть, что выполнена фотограмметрия снимков и построена 3-мерная сцена с координатами реперных объектов?
Вениамин! О масштабе ваших иллюстраций. Посмотрите на илл. 3 этой статьи. С официального сайта можно скачать с большим разрешением. Кратчайшее расстояние от центра ЛМ до Малого Западного Кратера составляет 50 метров с точностью десятки см. Согласно Вашим картинкам в статье - 54,5-55 метров. Вы противоречите легенде НАСА! Или у Вас масштабная линейка выбрана не правильно, примерно на 8-10% меньше, поэтому расстояния большие. В последнем случае, мы убеждаемся, что фотограмметрию снимков Аполлон-11 Вы подогнали к неверному масштабу снимков LROC. Вам шах!
По поводу v6 - еще раз сравните свои картинки. Помещен в разные положения на Ваших иллюстрациях!
Разрешение исходных кадров 0,40-0,48 м/пиксель. Программы работы с изображением позволяют рассматривать с большим разрешением. Благодаря наложению серии снимков друг на друга и их сведения с разрешением 0,21 м/пиксель, мы можем измерить размеры камней с погрешностью, которые указаны выше. В погрешность так же входит неровность ландшафта, когда длина тени разная при западном или восточном падении солнечных лучей. При анализе и сравнении LROC со снимками Аполлон-11 неровности ландшафта важно еще раз обсудить.
Конкретно, как Вы определяли расстояние по "трехмерной сцене координат реперных объектов" Аполлон-11? Какой алгоритм?
> Посмотрите на илл. 3 этой статьи. С официального сайта можно скачать с большим разрешением. Кратчайшее расстояние от центра ЛМ до Малого Западного Кратера составляет 50 метров с точностью десятки см. Согласно Вашим картинкам в статье - 54,5-55 метров.
Только что промерил сам расстояние до определенной точки небольшого кратера, около которого стоял Армстронг на валу Little West. Получил 51,7 м по нашей компенсации и 49,6 по карте USGS 1978-го года. Расхождение 4 %. Карта составлена более грубыми методами по старым снимкам LO низкого разрешения. Поэтому погрешности в несколько % - совершенно нормальная вещь.
> Или у Вас масштабная линейка выбрана не правильно, примерно на 8-10% меньше, поэтому расстояния большие.
Повторяю не знаю в какой раз: точность преобразования снимков LRO не может быть намного хуже ~2 %. На это и ориентируйтесь.
> В последнем случае, мы убеждаемся, что фотограмметрию снимков Аполлон-11 Вы подогнали к неверному масштабу снимков LROC.
Повторяю не знаю уже в каой раз: фотограмметрию невозможно "подогнать". Фотограмметрия такая, как она есть. Единственное, что можно подогнать - это масштаб снимков LROC. Но преобразование делал НЕ Я, поэтому фотограмметрия сейчас совершенно независима от масштабной трансформации снимков LROC. Но даже если в масштабной трансформации и была бы погрешность хоть в 5 %, это ничего не изменило бы в среднем, потому что "перелет" в одних местах скомпенсировался бы "недолетом" в других. При любом раскладе, несколько единиц % погрешности в принципе ничего не добавляет и не убавляет от результата, потому что сам метод имеет сегодня (в моем исполнении) погрешность сравнимой величины. Вы топчетесь на месте, бегая за блохами и пытаясь представить их слонами.
> По поводу v6 - еще раз сравните свои картинки. Помещен в разные положения на Ваших иллюстрациях!
На каких иллюстрациях он помещен в разные места? Скажите, я проверю.
> Разрешение исходных кадров 0,40-0,48 м/пиксель. Программы работы с изображением позволяют рассматривать с большим разрешением. Благодаря наложению серии снимков друг на друга и их сведения с разрешением 0,21 м/пиксель, мы можем измерить размеры камней с погрешностью, которые указаны выше.
Чепуха. Разрешение снимка не изменится, если Вы его увеличите хоть впятеро. Разрешение исходных снимков ок. 0,5 м/пиксель, и улучшить его невозможно. Сведение разных снимков невозможно сделать с более высокой точностью: само это сведение выполняется (на масштабе десятков метров) с точностью заведомо хуже 1 метра, поэтому это сведение ничем не поможет улучшить разрешение. Поэтому погрешность измерения предмета по снимкам не выше метра.
> В погрешность так же входит неровность ландшафта, когда длина тени разная при западном или восточном падении солнечных лучей. При анализе и сравнении LROC со снимками Аполлон-11 неровности ландшафта важно еще раз обсудить.
Их можно обсуждать сколько угодно, но факт остается фактом: по длине теней невозможно определить размер этих валунов мало-мальски точно, потому что рельеф заметно влияет на эту длину. Положение спасли бы снимки при высоком солнце, где влияние рельефа на тень не так велико; но при высоком солнце тени слишком коротки, и тогда сказывается уже погрешность измерения длины тени. Поэтому определять высоту валунов по снимкам LRO можно лишь примерно, с заметной погрешностью.
> Конкретно, как Вы определяли расстояние по "трехмерной сцене координат реперных объектов" Аполлон-11? Какой алгоритм?
Для простоты можете считать, что теорема Пифагора. Зная координаты репера и зная координаты центра ЛМ, можно посчитать расстояние до репера как квадратный корень из суммы квадратов разностей соответствующих координат. На практике использовался несколько более простой метод, но детали значения не имеют, принцип один.
Возьмите картинку http://www.workingonthemoon.com/Vlad/a11LROCDec09qtv_waves.jpg Разрешение согласно масштабной линейке 237 пикселей на 100 м или 0,422 м/пиксель. Центр ЛМ имеет координату: Х=96 У=53 Там где стоял Армстронг на валу кратера Little West координаты: Х=234 У=65. Получаем, расстояние от центра ЛМ до кратера, где стоял Армстронг равно 58,46 м. Согласно же карте НАСА данное расстояние равно 51 м. Чей масштаб верный?
Не разрешение увеличивается одного снимка, а уменьшается средняя квадратичная погрешность при использовании серии снимков или увеличивается точность, разрешение. Грубо говоря, используя три снимка с разрешением 0,4 м/пиксель, разрешение улучшается в 1,4 раза; 5 снимков - разрешение улучшается в два раза.
"Зная координаты репера и зная координаты центра ЛМ, можно посчитать расстояние до репера как квадратный корень из суммы квадратов разностей соответствующих координат". Это для вида с верху. А как в случае съемки с поверхности Аполлон-11 или сбоку, какой алгоритм?
> Согласно же карте НАСА данное расстояние равно 51 м. > Чей масштаб верный?
Давайте пользоваться более новой и более точной трансформацией LROC, http://savepic.net/1116491.jpg . Это не просто снимок, здесь выполнена деконволюция для выявления деталей изображения. Шкала 6,34 пикселей/метр. Все прочие объекты, кроме t1-t4, игнорируйте, валун v3 - переименованный бывший валун v6. Т. е. это новый вариант.
Положение Армстронга у кратера Little West на картах НАСА содержит ошибку, на него нельзя опираться. Моя фотограмметрическая карта точнее.
Длина шкалы на файле с картой 1978-го года у Вас здесь - ок. 127 пикселей, это 30 м. Расстояние от центра ЛМ до точки, где маленький кратер на валу пересекается с линией вала, ок. 219 пикселей, это (219/127)*30=51,7 м. На карте это расстояние ок. 331 пикселей, т. е. 333/6,34 = 52,5 м. Совпадение в 2 %.
Может, хватит ловить блох? Сколько можно?
>О v6: сравните положение v6 на иллюстрации > http://www.workingonthemoon.com/Vlad/a11lbl5887_qtv-sm.jpg и > http://www.workingonthemoon.com/Vlad/a11crplbl5936GrpsTV.jpg . > Как правильно?
На снимке http://www.workingonthemoon.com/Vlad/a11crplbl5936GrpsTV.jpg этот валун (на новых картах и снимках он переобозначен в v3) находится в точности ЗА камнем, над которым стоит точка. Именно поэтому он обозначен синим, а не красным, и в тексте это специально оговорено:
"v6 is marked with a blue dot in the full image because it is hidden by a group of bright, foreground boulders; the blue arrow and dot indicates the position of v6 behind this group, not the bright group".
> Не разрешение увеличивается одного снимка, а уменьшается средняя квадратичная > погрешность при использовании серии снимков или увеличивается точность, > разрешение. Грубо говоря, используя три снимка с разрешением 0,4 м/пиксель, > разрешение улучшается в 1,4 раза; 5 снимков - разрешение улучшается в два раза.
Поскольку это снимки, сделанные в разных условиях, и нет возможности свести их точнее, чем с точностью до нескольких пикселей, то все эти попытки что-то "улучшить" с помощью комбинации снимков есть чепуха. Были бы шансы, если бы снимки были сделаны в одинаковых условиях. Но при разных условиях и невозможности сопоставления с точностью, превышающей разрешение - мусор. забудьте.
> Это для вида с верху. А как в случае съемки с поверхности Аполлон-11 или сбоку, какой алгоритм?
Утомился повторять. См. сообщения 14 и 21. Мне скопировать соответствующие фрагменты?
Ок! Деконволюция снимков - интересная работа! Есть ссылка на программу?
Переходим к снимкам Аполлон-11.
Очевидно, имея такую подробную карту http://www.hq.nasa.gov/alsj/a11/a11EastCraterRIP.html можно имитировать лунный ландшафт вблизи ЛМ, например, с коэффициентом 1,8, тогда масштаб в 280 метров помещается на площадке 155 метров или радиусом 78 метров. В этом случае близкие валуны можно выдавать за дальние. А далее киноэкран.
Предположение легко проверяется на соответствие азимутов между реперными точками, как например камера и валуны t1-t4.
Согласно A11-40-5887 угол между t1-t4 составляет 8,4o. По LRO 6,55o. Согласно A11-40-5873 угол между t1-t4 составляет 9,2o. По LRO 7,99o. Точность приведенных цифр плюс минус 2%! Правда есть еще субъективная точность определения положения камеры! Как видим несоответствие есть! Расстояние до валунов меньше, чем выдается по легенде НАСА. Спасибо за наводку - теорему косинусов. Вам шах!
> Деконволюция снимков - интересная работа! Есть ссылка на программу?
Это работа одного человека, тоже интересующегося "Аполлонами". Его сайт довольно известен, но поскольку эти конкретные работы еще не опубликованы, я не могу помещать их целиком и давать ссылку. Они в скором времени обязательно появятся в открытом доступе либо на ALSJ, либо на сайте этого человека. А может, уже появились, не проверял.
> Очевидно, имея такую подробную карту http://www.hq.nasa.gov/alsj/a11/a11EastCraterRIP.html можно имитировать лунный ландшафт вблизи ЛМ, например, с коэффициентом 1,8, тогда масштаб в 280 метров помещается на площадке 155 метров или радиусом 78 метров. В этом случае близкие валуны можно выдавать за дальние. А далее киноэкран.
Во-первых, эта карта сама построена с использованием снимков "Аполлона-11". На ней множество деталей гораздо меньших по размеру, чем разрешение доступных в 1978-м г. снимков Lunar Orbiter (это разрешение составляло около метра). Хорошо видно, что снимки "Аполлона-11" использовались при построении этой карты.
Во-вторых, объекты на снимках "Аполлона-11" лоцируются на расстоянии вплоть до 400 м с лишним. А наблюдаемые и отождествляемые объекты находятся на еще бОльших расстояниях. Так что поперечник площадки, где объекты хорошо лоцируются - более полукилометра. А ведь фотограмметрию можно сделать еще точнее, чем сделал я: пусть не по всему полю, но в отдельных местах. Скажем, взяв мои данные в качестве первого приближения. Это не так уж трудно. Тогда лоцирование станет возможным еще дальше, может, и за километр. И ведь это только "Аполлон-11". В других экспедициях доступные обзору и промеру площадки гораздо, гораздо больше - на два порядка как минимум.
> Согласно A11-40-5887 угол между t1-t4 составляет 8,4o. По LRO 6,55o. > Согласно A11-40-5873 угол между t1-t4 составляет 9,2o. По LRO 7,99o. > Точность приведенных цифр плюс минус 2%!
По снимкам LRO Вы замерили более-менее правильно (я получил 6,5 и 7,9 градусов, но это мелочь, разница у нас меньше ширины валуна). Даже удивительно, что Вы смогли найти этот угол правильно; впрочем, если Вы пользовались моими фотограмметрическими положениями камер, то так и должно быть, а если пользовались положениями из Preliminary Report, то большой ошибка на таких расстояниях тоже не будет.
А вот по снимкам "Аполлона-11" Вы сильно промахнулись. Очень, очень сильно промахнулись. По 5887 я получил 6,5 градусов, а по 5873 - 7,8 градусов. Все сходится, как в аптеке.
Скорее всего, Вы просто не умеете правильно считать угловые расстояния по фотографиям. Могу научить и подарить считалку в Экселе. :) Но только в обмен на рассказ о том, как Вы сами считаете. :)
> Как видим соответствие отсутствует! Расстояние до валунов меньше, чем выдается по легенде НАСА.
Соответствие присутствует, причем полное соответствие. Все именно так, как и должно быть. Когда Вы научитесь правильно считать угловые расстояния по снимкам, Вы многому удивитесь. :)
Влад, приводите готовые результаты. Думаю, что ошибка снова у Вас из-за субъективной погрешности.
Если использовать положение камер по Вашим реперам, тогда результат такой Согласно A11-40-5887 угол между t1-t4 составляет 7,26 градусов. По LRO 6,12 градусов. Согласно A11-40-5873 угол между t1-t4 составляет 9,06 градусов. По LRO 7,64 градусов.
Углы по снимкам пересчитаны к главной оптической оси.
> Думаю, что ошибка снова у Вас из-за субъективной погрешности.
Какая уж тут субъективная погрешность? Ширина двух валунов максимум. Но я брал по вершинам валунов, т. е. примерно посередине их ширины.
> Если использовать положение камер по Вашим реперам, тогда результат такой Согласно A11-40-5887 угол между t1-t4 составляет 7,26 градусов. По LRO 6,12 градусов. Согласно A11-40-5873 угол между t1-t4 составляет 9,06 градусов. По LRO 7,64 градусов.
Ну вот у Вас уже и углы со снимков LRO стали прыгать. Куда делись те, что Вы назвали вчера?
Могу лишь повторить: измерение по снимкам LRO с мест положения камер по моей фотограмметрической карте для снимков 5887/5873 получаются углы 6,5/7,9 градусов, а при измерении по снимкам "Аполлона-11" получается 6,5/7,8 градусов. Естественно, имеется неопределенность в десятые доли градуса. Но все сходится
> Углы по снимкам пересчитаны к главной оптической оси.
Что бы это значило? В общем, приведите картинки и свой способ измерения. А потом я покажу, как это нужно делать на самом деле.
Вениамин, у Вас все где-то и у кого-то. Тот материал который вы подготовили, выявил массу недостатков, например, неправильную масштабную линейку (пока мы проверили и поправили по Х, по У не проверялось), напутано, опечатки и исправлено с обозначением валунов, подогнаны и исправлены расстояния до валунов, прочее. При этом Вы отмечаете, что есть где-то классная методика фотограмметрии.
Понимаете о чем я?! Будьте аккуратнее, если Вы пишите утверждение, тогда полезно обосновать, а не пусто утверждать "на основе трехмерной модели", если Вы видите ошибки, тогда приводите свои формулы или материалы. Заниматься детскими играми не нужно.
Теперь по теме. Если взять снимки с разрешение 3900х3900, тогда получим
Согласно A11-40-5887 угол между t1-t4 составляет 7,29o. По LRO 6,12o.
Согласно A11-40-5873 угол между t1-t4 составляет 8,87o. По LRO 7,64o.
Для определения угловых размеров по снимкам используется обобщенная теорема Пифагора или теорема косинусов. Мы имеем угловое несоответствие, которое можно объяснить просто - удаленные валуны ближе, чем выдается по легенде НАСА.
Это касается и других объектов, например, Малый Западный Кратер.
Вид на Малый Западный Кратер. Зеленными точками обозначен измеряемый угловой размер. AS-11-40-5865
Согласно A11-40-5865 угловой размер кратера составляет 23,72o. По LRO 29,78o.
Очевидное несоответствие, данный кратер меньше. Это значит, что взаимное положение элементов (или углы между положениями объектов относительно фотокамеры), как крупные камни и кратеры на снимках LRO отличаются от их положения на снимках Аполлонов.
> Вениамин, у Вас все где-то и у кого-то. Тот материал который вы подготовили, выявил массу недостатков, например, неправильную масштабную линейку (пока мы проверили и поправили по Х, по У не проверялось), напутано, опечатки и исправлено с обозначением валунов, подогнаны и исправлены расстояния до валунов, прочее.
По-моему, я с самого начала сказал, что страница http://www.workingonthemoon.com/Vlad/a11Photogrammetry.html находится в работе, на ней много старых изображений, которые со временем заменяются. Видно же, что часть ссылок не работает, местами красным отмечено, что еще предстоит сделать, и т. п. Там ничего не напутано и не подогнано - просто предварительные результаты (многие из них получены много месяцев назад) потихоньку замещаются более свежими.
> При этом Вы отмечаете, что есть где-то классная методика фотограмметрии.
В смысле? Работа есть не где-то, а у меня.
> Понимаете о чем я?! Будьте аккуратнее, если Вы пишите утверждение, тогда полезно обосновать, а не пусто утверждать "на основе трехмерной модели", если Вы видите ошибки, тогда приводите свои формулы или материалы. Заниматься детскими играми не нужно.
Какие Вам нужны формулы и материалы? Я Вам детальнейшим образом объяснил, что и как, причем чуть не каждую вещь повторял по три-четыре раза, потому что с первого раза Вы не понимаете.
Вот сейчас Вы выдали угловые расстояния, которые определенно ошибочны. Значит, Вы не умеете считать правильно. Вот сейчас Вы покажете, как Вы считаете, а потом я покажу Вам, как на самом деле нужно считать. Вы научитесь, и все у Вас получится. :)
> Теперь по теме. > Если взять разрешение снимков с разрешение 3900х3900, тогда получим > Согласно A11-40-5887 угол между t1-t4 составляет 7,29o. По LRO 6,12o. > Согласно A11-40-5873 угол между t1-t4 составляет 8,87o. По LRO 7,64o. > Для определения угловых размеров по снимкам используется обобщенная теорема Пифагора или теорема косинусов. > Мы имеем угловое несоответствие, которое можно объяснить просто - удаленные валуны ближе, чем выдается по легенде НАСА.
Еще раз повторяю: НЕТ. Вы неправильно посчитали. Ваши результаты грубо ошибочны, особенно в отношении снимков "Аполлона-11". По снимкам LRO у Вас цифры точнее. Хотя вчера они были еще точнее, но сегодня у Вас с ними что-то произошло. Ну давайте я Вам покажу на примере снимков LRO, возьмем для определенности 5887. Вот здесь на картинке - http://savepic.net/1126640.jpg - белыми точками показаны места съемки 5887 и 5873. Там же красными точками - валуны t1 и t4 (и другие). Считаем координаты середин точек: 5887: (45, 91) t1: (976, 312) t4: (757, 348)
Длины сторон треугольника по теореме Пифагора: 5887-t1: sqrt(sqr(976-45)+sqr(312-91))=957 5887-t4: 757 t1-t4: 222 Угол при вершине 5887 по теореме косинусов: alpha = arccos((sqr(957)+sqr(757)-sqr(222))/(2*957*757)) = 6,5 градусов. Видите? Вчера Вы дали правильную цифру, а сегодня неправильную. Что у Вас там изменилось, почему у Вас неправильная цифра?
5887-t1: 950 5887-t4: 761 t1-t4: 222 alpha = arccos((sqr(950)+sqr(761)-sqr(222))/(2*950*761)) = 7,9 градусов. Видите? И здесь вчера Вы дали правильную цифру, а сегодня неправильную. Что у Вас там изменилось, почему у Вас снова неправильная цифра?





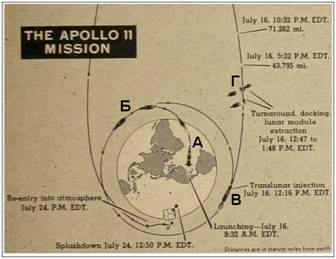






 Аполлон-11 (Apollo 11) - пилотируемый космический корабль серии «Аполлон», который по легенде НАСА впервые доставил людей на поверхность другого космического тела - Луны.
Аполлон-11 (Apollo 11) - пилотируемый космический корабль серии «Аполлон», который по легенде НАСА впервые доставил людей на поверхность другого космического тела - Луны.