Здравствуйте!
Значение стереобазы не нужно. Поясню на алгоритме дальнейшего решения в метрах.
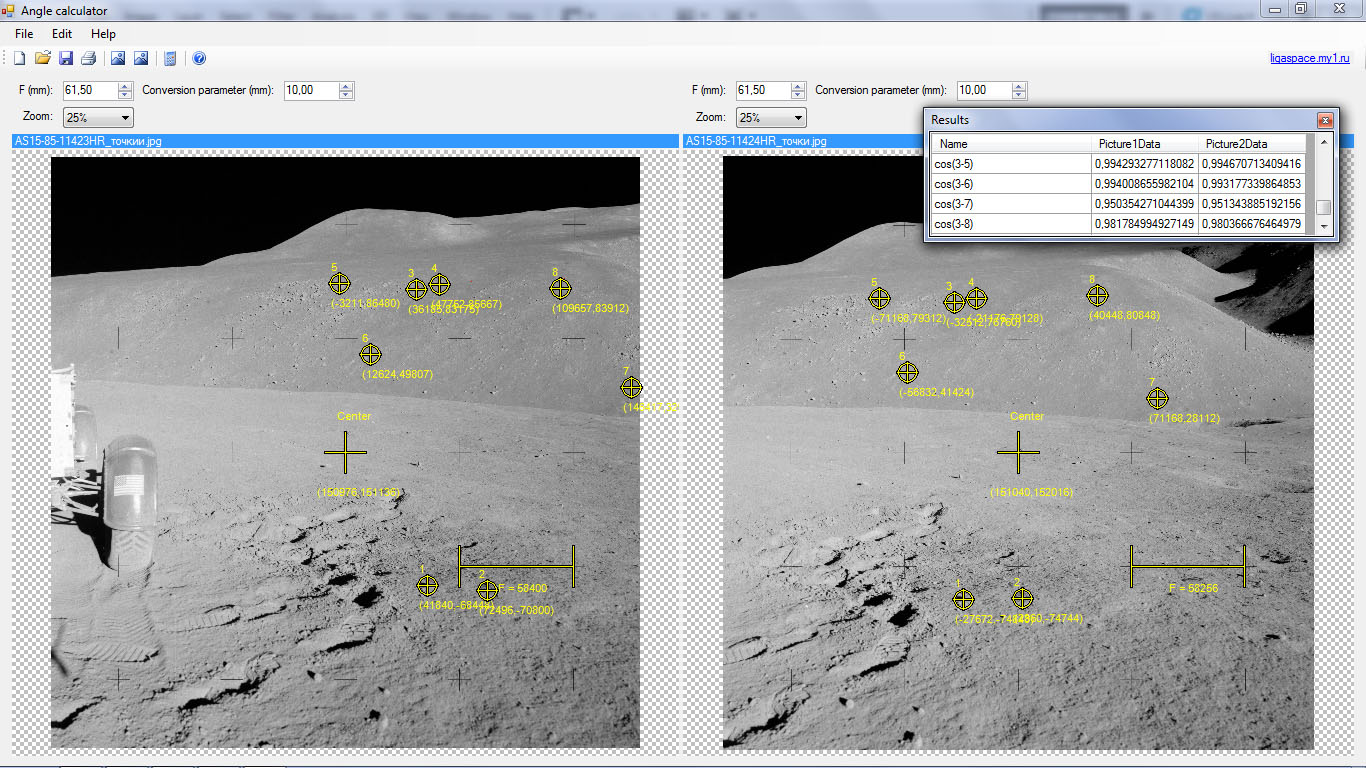
Берем восемь точек 1-8. В итоге получаем 28 углов между точками для первого и второго снимка. В программе определения углов зашиты данные камеры Хасселя. Однако, в принципе, их то же можно определить из системы уравнений. (Уравнение очень усложняется). Берем Не меньше 5 точек. Для 5 точек имеем имеем 20 уравнений и 18 неизвестных. При 4 точках имеем 12 уравнений и 15 неизвестных. Т.е. для 4 точек математически решить нельзя.
Каждая точка в трехмерном пространстве имеет координаты (X,Y,Z).
По теореме Пифагора (косинусов) составляем уравнение и выражаем угол через координаты точек. Например, угол cos(1-2)=(1^2+2^2-(1-2)^2)/2*1*2, где жирным цветом выделено расстояние выраженное в (X,Y,Z) соответствующей точки.
Получаем 56 уравнений.
За нулевую точку отсчета берем 1. (Так же можно наложить явные условия, например, точки на переднем плане находятся ближе, чем на дальнем плане снимков).
В итоге, мы имеем 56 уравнений и 29 неизвестных (+3 неизвестных или стереобаза перемещения камеры). Это теорема косинусов + система уравнений! В принципе - это школьный курс. С другой стороны - это задача Институтов по
фотограмметрии.
Решаем систему уравнений и получаем значение (X,Y,Z) всех точек 1-8. Я пользуюсь Excel. Правильно же посмотреть решение в других математических программах.
Т.е. значение стереобазы находится из системы уравнений координат всех точек.
На настоящий момент, задача решена для А-15 разлом Хэдли. Одна пара снимков! Лучшее решение с наименьшим отклонением от фактических данных, если от камеры до дальнего склона Хэдли 100 метров.











 В последнее время дискуссия между сторонниками и оппонентами пребывания человека на Луне ослабла. Однако, каждый остался при своем мнение. Часть бесспорно считает, что американцы полвека назад ступали на поверхность Луны, другая часть считает, что это стратегический обман времен холодной войны...
В последнее время дискуссия между сторонниками и оппонентами пребывания человека на Луне ослабла. Однако, каждый остался при своем мнение. Часть бесспорно считает, что американцы полвека назад ступали на поверхность Луны, другая часть считает, что это стратегический обман времен холодной войны...